MEHANIKA VOŽNJE - Odsek za puteve, železnice i aerodrome
|
|
|
- Borka Nikolić
- пре 6 година
- Прикази:
Транскрипт
1 MEHANIKA VOšNJE Odsek za puteve, ºeleznice i aerodrome Prof dr Stanko Br i Doc dr Stanko ori Doc dr Anina Glumac Graževinski fakultet Univerzitet u Beogradu k. god. 2018/19
2 Sadrºaj 1 Kotrljanje to ka bez klizanja Kotrljanje to ka sa klizanjem 2 Geometrija to kova i ²ina 3 Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion" 4

3 Kotrljanje to ka bez klizanja Kotrljanje to ka sa klizanjem Obrtno postolje - izmežu kabine i to kova

4 Osovinski sklop na ²inama Kotrljanje to ka bez klizanja Kotrljanje to ka sa klizanjem
5 Kotrljanje to ka bez klizanja Kotrljanje to ka sa klizanjem Kotrljanje krutog to ka po krutoj podlozi 3.4 Contact Forces between Wheel and Guideway 117 a) m, I C b) M C C r v C ω M C C m, I C r v C ω O I e I ν 3 1 P Q, v P =0 O I 1 e I ν 3 Q P, v P < 0 M C M C f G C v C ω f G C v C ω f t P, v P =0 f t P, v P < 0 f t µ 0f n f t = µf nsgnv P f n f n f G = mg f G = mg Fig States of motion of a free rigid wheel on a rigid guideway: a) kinematic rolling; b) combination of rolling and sliding
6 Kotrljanje to ka bez klizanja Kotrljanje to ka sa klizanjem Kotrljanje krutog to ka po krutoj podlozi Dva reºima kotrljanja krutog to ka po krutoj podlozi Kotrljanje bez klizanja ( isto kotrljanje) Kombinovano kotrljanje sa klizanjem Diferencijalne jedna ine ravnog kretanja Homogeni kruti to ak: masa m, moment inercije J C = 1 2 mr2, polupre nik r Na to ak deluje obrtni spreg M C = M C (t) U slu aju istog kotrljanja (bez klizanja), ta ka kontakta P je trenutni centar rotacije, odn. v P = 0
7 Kotrljanje to ka bez klizanja Kotrljanje to ka sa klizanjem Sadrºaj 1 Kotrljanje to ka bez klizanja Kotrljanje to ka sa klizanjem 2 Geometrija to kova i ²ina 3 Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion" 4
8 Kotrljanje to ka bez klizanja Kotrljanje to ka sa klizanjem Kotrljanje krutog to ka po krutoj podlozi Kotrljanje bez klizanja ( isto kotrljanje) Uslov kotrljanja bez klizanja: v C = ω r Na kontaktu to ka i podloge, u ta ki P, deluju reakcije veza f n i f t : f n 0 f t µ 0 f n Sila f n 0 predstavlja jednostranu vezu Sila f t = µ 0 f n je sila trenja u skladu sa Kulonovim zakonom trenja µ 0 je stati ki koecijent trenja
9 Kotrljanje to ka bez klizanja Kotrljanje to ka sa klizanjem Kotrljanje krutog to ka po krutoj podlozi Kotrljanje bez klizanja ( isto kotrljanje) Diferencijalne jedna ine ravnog kretanja to ka 0 = mg f n m v C = f t J C ω = M C f t r (1) pri emu vaºi uslov kotrljanja bez klizanja v C = ω r (2)
10 Kotrljanje to ka bez klizanja Kotrljanje to ka sa klizanjem Kotrljanje krutog to ka po krutoj podlozi Kotrljanje bez klizanja ( isto kotrljanje) Re²enje jedna ina ravnog kretanja to ka (imaju i u vidu da je J C = 1 2 mr2 ) v C = ω = v C r f n = mg M C/r m + J C /r 2 = 2 M C 3 m r (3) f t = m v C = 2 M C 3 r
11 Kotrljanje to ka bez klizanja Kotrljanje to ka sa klizanjem Kotrljanje krutog to ka po krutoj podlozi Kotrljanje bez klizanja ( isto kotrljanje) U zavisnosti od zakona M C = M C (t) kao i od po etnih uslova kretanja, dobija se re²enje v C = v C (t) Iz uslova f t µ 0 f n se dobija ograni enje za obrtni momenat: Reakcija veze f t ne vr²i mehani ki rad (deluje u trenutnom centru rotacija) M C µ m g r (4)
12 Kotrljanje to ka bez klizanja Kotrljanje to ka sa klizanjem Kotrljanje krutog to ka po krutoj podlozi 3.4 Contact Forces between Wheel and Guideway 117 a) m, I C b) M C C r v C ω M C C m, I C r v C ω O I e I ν 3 1 P Q, v P =0 O I 1 e I ν 3 Q P, v P < 0 M C M C f G C v C ω f G C v C ω f t P, v P =0 f t P, v P < 0 f t µ 0f n f t = µf nsgnv P f n f n f G = mg f G = mg Fig States of motion of a free rigid wheel on a rigid guideway: a) kinematic rolling; b) combination of rolling and sliding
13 Kotrljanje to ka bez klizanja Kotrljanje to ka sa klizanjem Sadrºaj 1 Kotrljanje to ka bez klizanja Kotrljanje to ka sa klizanjem 2 Geometrija to kova i ²ina 3 Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion" 4
14 Kotrljanje to ka bez klizanja Kotrljanje to ka sa klizanjem Kotrljanje krutog to ka po krutoj podlozi Kotrljanje to ka sa klizanjem U slu aju kotrljanja sa klizanjem trenutni centar rotacije je izmežu centra mase to ka C i ta ke kontakta P Brzina kontaktne ta ke P je data sa: v P = v C ω r (5) Odnos brzine klizanja kontaktne ta ke P i brzine kotrljanja centra mase to ka C je koecijent klizanja krutog tela: ν = v P v C = v C ω r v C (6)
15 Kotrljanje to ka bez klizanja Kotrljanje to ka sa klizanjem Kotrljanje krutog to ka po krutoj podlozi Kotrljanje to ka sa klizanjem U ta ki kontakta P, osim normalne reakcije f n deluje i sila f t koja se posmatra kao aktivna sila koja sledi iz Kulonovog zakona trenja za slu aj klizanja: f t = µ f n v P v P = µ f n sgn( v P ) (7) gde je µ dinami ki koecijent trenja klizanja (µ < µ 0 ) Takože je f n 0 v P = v C ω r (8)
16 Kotrljanje to ka bez klizanja Kotrljanje to ka sa klizanjem Kotrljanje krutog to ka po krutoj podlozi Kotrljanje to ka sa klizanjem Dif. jedn. ravnog kretanja (1) su iste i u slu aju kotrljanja sa klizanjem Re²avanjem jedna ina (1), uz relacije (7) i (8), dobija se re²enje za kinemati ke veli ine v C = µ g sgn(v C r ω) ω = 1 J C (M C rm v C ) (9) kao i re²enje za sile f n i f t : f n = mg f t = µ m g sgn(v C rω) (10)
17 Kotrljanje to ka bez klizanja Kotrljanje to ka sa klizanjem Kotrljanje krutog to ka po krutoj podlozi Kotrljanje to ka sa klizanjem Re²enje (9) pretstavlja spregnut sistem i re²ava se iterativno Pretpostavi se znak brzine v P = v C rω, npr. v P < 0, pa se iz prve od jedn. (9) odredi v C Unose i u drugu od jedn. (9), za datu zavisnost M C = M C (t) i poznate po etne uslove, odredi se ω = ω(t) Pretpostavka o znaku v P sa zatim proveri i ponovi se re²avanje ako nije zadovoljena
18 Kotrljanje to ka bez klizanja Kotrljanje to ka sa klizanjem Kotrljanje krutog to ka po krutoj podlozi Kotrljanje to ka sa klizanjem Sila f t je disipativna sila. Ona vr²i mehani ki rad A 1 2 = 2 1 f t ds = t 0 f t v P dt = t Razlike izmežu istog kotrljanja to ka, slu aj (a) i kotrljanja sa klizanjem, slu aj (b): 0 µ m g v P dt (11) - Ta ka kontakta je u slu aju (a) trenutni centar rotacije, a u slu aju (b) nije - U slu aju (a) sila trenja f t je reakcija veze, a u slu aju (b) je aktivna, disipativna, sila
19 Kotrljanje to ka bez klizanja Kotrljanje to ka sa klizanjem Kotrljanje krutog to ka po krutoj podlozi Kotrljanje to ka sa klizanjem U slu aju (a) sila f t ne vr²i mehani ki rad, dok u slu aju (b) disipativna sila f t vr²i negativan rad U slu aju (a) stati ka sila trenja f t ubrzava centar to ka, pri emu postoji i odreženo ograni enje (4) za obrtni momenat U slu aju (b), usled trenja nastaje sila klizanja f t (suprotnog smera od brzine kontaktne ta ke P) U oba slu aja mogu da se odrede sve nepoznate v C, ω, f n, f t
20 Geometrija to kova i ²ina Sistemi krutih tela - modeli analize kretanja Analiza kretanja ²inskih vozila je nelinearna je - geometrijska nelinearnost - materijalna nelinearnost Geometrijska nelinearnost nastaje usled velikih rotacija i/ili velikih pomeranja pojedinih komponenti vozila Krivolinijska geometrija trase je izvor nelinearnosti Materijalna nelinearnost nastaje usled nelinearnih konstitutivnih relacija sila/pomeranje (plasti no ili viskoelasti no pona²anje) Dinami ka interakcija to ak/²ina zahteva odreživanje nelinearnih sila veze
21 Geometrija to kova i ²ina Sistemi krutih tela - modeli analize kretanja Modeliranje kretanja ²inskih vozila Speci nost modeliranja kretanja ²inskih vozila je u interakciji to kova i ²ina Postoje, na elno, dva tipa interakcije: - kontakt to ak/²ina - magnetska levitacija (ne posmatra se) Generisanje kretanja ²inskih vozila preko kotrljanja i klizanja to kova na ²inama Kontaktne sile u dinami koj interakciji to ak/²ina, kao i kinemati ke veli ine, mogu da budu izvor raznih nestabilnosti kretanja: - fenomen vijuganja ("hunting phenomenon") - iskakanje vagona iz ²ina ("derailment")
22 Geometrija to kova i ²ina Sadrºaj 1 Kotrljanje to ka bez klizanja Kotrljanje to ka sa klizanjem 2 Geometrija to kova i ²ina 3 Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion" 4
23 Geometrija to kova i ²ina Modeliranje kretanja ²inskih vozila Geometrija to kova i ²ina U analizi kontakta to kova i ²ina bitno je precizno prikazivanje geometrije i ²ina i to kova Ta no prikazivanje teorijske geometrije kontaktne povr²ine to kova i ²ina Procena o²te enja ²ina i to kova i odgovaraju eg prikazivanja u analizama Formulacija diferencijalnih jedna ina kretanja treba da obuhvati problem kontakta to kova i ²ina Ta nost numeri kog re²enja kontaktnog problema zavisi od procene lokacija kontaktnih ta aka
24 Geometrija to kova i ²ina Geometrija to kova i ²ina
25 Geometrija Modelsto kova for Support andi Guidance ²ina Systems Geometrija to kova i ²ina R R1 = r 0 R R2 P e K 1 P e K 2 R S2 e K 3 R S1 e K 3
26 Geometrija to kova i ²ina Geometrija krive linije u prostoru
27 Geometrija osovine trase pruge Geometrija to kova i ²ina

28 Geometrija krivolinijske povr²i Geometrija to kova i ²ina
29 Geometrija glave ²ine Geometrija to kova i ²ina

30 Izdizanje ²ina u krivini Geometrija to kova i ²ina

31 Geometrija to ka na ²ini Geometrija to kova i ²ina
32 Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion" Sadrºaj 1 Kotrljanje to ka bez klizanja Kotrljanje to ka sa klizanjem 2 Geometrija to kova i ²ina 3 Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion" 4
33 Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion" "Penjanje" to ka na ²inu - Nadalova formula
34 Modeliranje kretanja ²inskih vozila Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion" "Penjanje" to ka na ²inu - Nadalova formula (1908) Kontakt to ka i ²ine se realizuje na an²i to ka i bo nom delu glave ²ine Sile kojima to ak deluje na ²inu, V i L (vertikalna i horizontalna sila) su u ravnoteºi sa reakcijama ²ine N i F Ako je ugao nagiba an²e to ka jednak α, a µ koecijent trenja izmežu to ka i ²ine, onda moºe da se izvede relacija (Nadal, 1908) L V = tan α µ (12) 1 + µ tan α
35 Modeliranje kretanja ²inskih vozila Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion" "Penjanje" to ka na ²inu - Nadalova formula (1908) Ako odnos sila V i L prekora i desnu stranu relacije (12), moºe da dože do "penjanja" to ka na ²inu Problem kada odnos L/V prekora i neki iznos nije vezan samo za "penjanje" to ka Ako se kontakt to ka i ²ine realizuje u dve ta ke i ako je bo na sila to ka na ²inu relativno velika (ve a od nekog iznosa), moºe da nastane bo no iskliznu e iz ²ina To se naziva i pove anje razmaka ²ina ("gage widening")
36 Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion" Sadrºaj 1 Kotrljanje to ka bez klizanja Kotrljanje to ka sa klizanjem 2 Geometrija to kova i ²ina 3 Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion" 4
37 Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion" Bo no iskliznu e to ka - ²irenje koloseka
38 Modeliranje kretanja ²inskih vozila Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion" Preturanje ²ine Ako odnos sila V i L prekora i neki iznos, moºe da dože do iskliznu a voza sa ²ina usled "preturanja" ²ine Ako je odnos sila ve i od geometrijskog odnosa, L V > D H moºe da dože do preturanja ²ine Ako je ta ka kontakta to ka i ²ine na unutra²njoj strani ²ine, pri emu je L/V [ ] (u zavisnosti od oblika ²ine), moºe da dože do preturanja ²ine (Blader, 1989)
39 Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion" Iskliznu e to ka usled preturanja ²ine
40 Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion" Sadrºaj 1 Kotrljanje to ka bez klizanja Kotrljanje to ka sa klizanjem 2 Geometrija to kova i ²ina 3 Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion" 4
41 Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion" Vijuganje voza - "Hunting motion" 2.2 Kinematics 43 a a r0a λ = 2π tanδ0 r0 δ0 x y
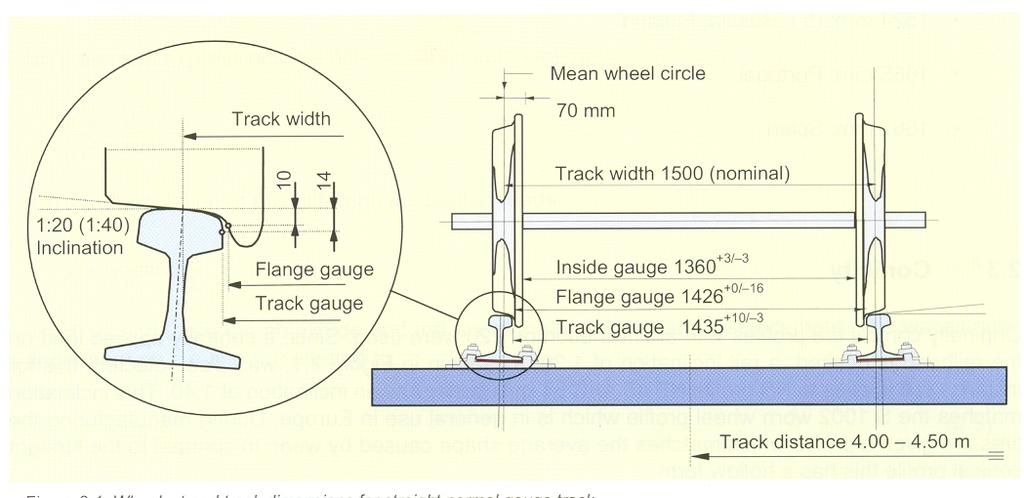
42 Modeliranje kretanja ²inskih vozila Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion" Vijuganje voza - "Hunting motion" (bo na nestabilnost voza) Jedan od problema bo ne stabilnosti kretanja voza je i vijuganje ("hunting motion") To je bo no kretanje osovine to kova u odnosu na sredinu koloseka Osovinski slog su dva to ka koji su kruto spojeni osovinom To kovi su konusnog oblika, sa nagibom 1:20 (ili 1:40), pri emu je ve i pre nik na unutra²njoj strani ²ina Takav oblik uti e da se osovinski sklop automatski sam centrira tokom kretanja u odnosu na osu koloseka i time se javlja manji kontakt izmežu an²e to ka i unutra²nje strane ²ine (Karnopp, 2004)

43 Polupre nici kotrljanja to kova Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion"
44 Modeliranje kretanja ²inskih vozila Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion" Vijuganje voza - "Hunting motion" (bo na nestabilnost voza) Usled bilo kakvog poreme aja (imperfekcija ²ina), osovinski slog moºe da se bo no kre e U ravnoteºnoj konguraciji kretanja, osovinski slog je centriran u donosu na osu pruge: (y = 0) Zbog konusnog oblika (bandaºa) to kova (ugao γ), polupre nici kotrljanja levog i desnog to ka su R l i R r U ravnoteºnoj konguraciji (y = 0), polupre nici oba to ka su mežusobno isti, R 0, (ako su to kovi isti, ispravni i simetri no nasaženi na osovinu)
45 Modeliranje kretanja ²inskih vozila Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion" Vijuganje voza - "Hunting motion" (bo na nestabilnost voza) Zbog konusnog oblika (ugao γ), ako se osovina bo no pomeri za (mali iznos) y, promena radijusa kotrljanja to ka je R = y γ Polupre nici kotrljanja to kova su tada dati sa R r = R 0 y γ R l = R 0 + y γ Ako se osovinski slog okre e sa ugaonom brzinom ω, brzine ta aka kontakta desnog i levog to ka su v r = R r ω v l = R l ω
46 Vijuganje osovinskog sloga Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion"
47 Modeliranje kretanja ²inskih vozila Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion" Vijuganje voza - "Hunting motion" (bo na nestabilnost voza) Brzina sredi²ta osovine je jednaka v = v r + v l 2 = R 0 ω Za mali ugao skretanja (ugao rotacije oko vertikalne ose) je tan ψ ψ, pa je vremenska promena ugla skretanja data sa ẏ = dy dt = dy dx dx dt = ψ v = ψ R 0 ω (13) Promena ugla skretanja moºe da se prikaºe kao ψ = v r v l G = 2y ω γ G (14)
48 Modeliranje kretanja ²inskih vozila Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion" Vijuganje voza - "Hunting motion" (bo na nestabilnost voza) Diferenciranjem jedn. (13) po vremenu i uno²enjem za ψ desne strane jedn. (14), dobija se jedna ina ÿ + ( 2R 0 ω 2 γ G ) y = 0 (15) Jedna ina (15) je oblika ÿ + Ω 2 y = 0 i re²enje je, ako je koecijent Ω 2 uz y pozitivan, dato sa y(t) = A sin(ωt + C) (16) gde se A i C odrežuju iz po etnih uslova
49 Modeliranje kretanja ²inskih vozila Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion" Vijuganje voza - "Hunting motion" (bo na nestabilnost voza) Koecijent Ω je svojstvena frekvencija vijuganja Imaju i u vidu relaciju v = R 0 ω, dobija se kruºna frekvencija vijuganja 2R0 ω Ω = 2 γ 2γ = v (17) G R 0 G kao i preriod vijuganja λ = 2π Ω = 2π v R 0 G 2γ (18) Relacije (17) i (18) se zovu Klingelove formule (Klingel, 1883)
50 Modeliranje kretanja ²inskih vozila Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion" Vijuganje voza - "Hunting motion" (bo na nestabilnost voza) Re²enje (16) pretstavlja oscilatrotno kretanje sa konstantnom amplitudom A Takvo kretanje vaºi samo ako je Ω 2 > 0 To e da bude ispunjeno samo ako je γ > 0, odn. ako su to kovi konusnog oblika sa pozitivnim nagibom Ako su to kovi cilindri ni, onda je γ = 0, pa je i Ω 2 = 0, odn. re²enje je prava linija Ako je Ω 2 < 0, odn. ako je to ak sa negativnim nagibom, γ < 0, onda kretanje osovinskog sloga nije oscilatorno
51 Vijuganje osovinskog sloga Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion"
52 Vijuganje voza - "Hunting motion" 44 2 Vehicle Models Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion" a) b) c) x x x y y y Fig Wheelset motion with different conicities: a) stable motion; b) indifferent
53 y y y Vijuganje voza - "Hunting motion" Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion" Fig Wheelset motion with different conicities: a) stable motion; b) indifferent motion; c) unstable motion
54 Osovinski sklop: kruta veza osovine i dva to ka To kovi su speci nog oblika: konusni u popre nom pravcu nagib konusa (1:20) sa padom ka spolja venac sa unutra²nje strane ²ina (grani nik) Osim kretanja u pravcu koloseka, osa x, kotrljanje sa klizanjem, stepeni slobode kretanja osovinskog sklopa su i: Popre no pomeranje (u pravcu ose y) Rotacija oko vertikalne ose (skretanje, α)
55 Stepeni slobode kretanja to kova
56 Koordinatni sistemi ²ine, to ka i kontakta
57 Kontakt izmežu to kova i ²ina Interfejs izmežu to ka i ²ine je mala kontaktna zona Sile velikih intenziteta, na maloj povr²ini: normalna i dve tangencijalne - normalna, gravitaciona, sila F z - tangencijalna poduºna (vu na sila ili sila ko enja) F x - tangencijalna popre na (sila bo nog voženja, parazitna) F y Kontaktni pritisci su prakti no koncentracija napona ( esto preko 1000 MPa) Analiza normalnih sila (Hertz-ova teorija,... ) Analiza tangencijalnih sila (Kalker-ova teorija)
58 Sile na kontaktu to ka i ²ine
59 Sadrºaj 1 Kotrljanje to ka bez klizanja Kotrljanje to ka sa klizanjem 2 Geometrija to kova i ²ina 3 Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion" 4
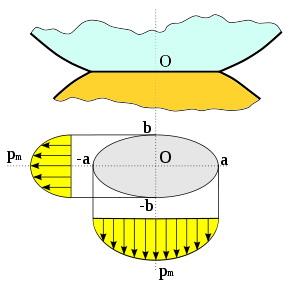
60 Heinrich Hertz ( ), dao osnove Mehanike kontakta (1882) Naponi pritiska i adhezije u pravcu normale na povr²ine kontakta Smi u i naponi (trenje) u tangencijalnoj ravni izmežu dva tela Hertz posmatrao kontakt dve pritisnute elasti ne sfere (bez adhezije) Polupre nici krivine povr²i oba tela su veliki u odnosu na kontaktnu povr²inu Radijusi krivine su konstantni u zoni mežusobnog kontakta
61 Hertz je pokazao da je kontaktna povr²ina ravna i oblika elipse sa poluosama a i b Naponi mežusobnog pritiska su respodeljeni u obliku polu-elipsoida Poluose elipse kontaktne povr²ine se izraºavaju preko elasti nih osobina tela, kao i geometrije povr²i tela (polupre nici glavnih krivina) Srednji kontaktni napon (za ukupnu normalnu silu N ), kao i najve i napon (u centru elipse): σ sr = N π a b σ max = 3 N 2 π a b
62
63 Kontakt dva tela (dve sfere)
64 Kontakt to ka i ²ine

65 Kontakt to ka i ²ine
66 Kontakt to ka i ²ine - tangencijalne sile i spreg M z
67 Kontakt to ka i ²ine i sile veze
68 Kontakt to ka i ²ine i sile veze
69 Kontakt to ka i ²ine i sile veze
70 Kontakt to ka i ²ine i sile veze
71 Sadrºaj 1 Kotrljanje to ka bez klizanja Kotrljanje to ka sa klizanjem 2 Geometrija to kova i ²ina 3 Penjanje to ka na ²inu Iskliznu e to ka: ²irenje koloseka i preturanje ²ine Vijuganje voza - "Hunting motion" 4
72 Mehanizmi ispadanje voza iz ²ina je usled gubitka bo nog voženja to kova po ²inama ƒetiri glavna mehanizma ispadanja voza iz ²ina: "Penjanje" an²e to ka na glavu ²ine Pro²irenje razmaka izmežu ²ina Preturanje ²ine Bo no smicanje koloseka
73 Penjanje to ka na glavu ²ine "Penjanje" an²e to ka na glavu ²ine moºe da se, na elno, dogodi na krivini Kombinacija relativno velike bo ne sile L i smanjene vertikalne sile V Velika bo na sila obi no nastaje pri velikom uglu skretanja (odn. napadnom uglu) to ka Uti e radijus krivine trase, lokalni uslovi povr²ina ²ine i to ka, karakteristike ve²anja obrtnog postolja, brzina kretanja voza, itd. Nadalova L/V formula (posmatra se samo jedan to ak)
74 Napadni ugao to ka u odnosu na ²ine
75 Faze penjanja to ka na ²inu
76 Nadalova formula - samo jedan to ak se posmatra
77 Modeliranje kretanja ²inskih vozila "Penjanje" to ka na ²inu - Nadalova formula (1908) Kontakt to ka i ²ine se realizuje na an²i to ka i bo nom delu glave ²ine Sile kojima to ak deluje na ²inu, V i L (vertikalna i horizontalna sila) su u ravnoteºi sa reakcijama ²ine N i F Ako je ugao nagiba an²e to ka jednak α, a µ koecijent trenja izmežu to ka i ²ine, onda moºe da se izvede relacija (Nadal, 1908) L V = tan α µ 1 + µ tan α
78 Nadalova formula - zavisnost od upadnog ugla

79 Ispadanje to ka usled bo nog ²irenja koloseka

80 Ispadanje to ka usled bo nog ²irenja koloseka
81 Ispadanje to ka usled preturanja ²ine

82 Primer labavog pri vrsnog sistema
83 Bo no klizanje celog koloseka
84 Ispadanje iz ²ina usled vijuganja

85 : odron kamenja
Динамика крутог тела
 Динамика крутог тела. Задаци за вежбу 1. Штап масе m и дужине L се крајем А наслања на храпаву хоризонталну раван, док на другом крају дејствује сила F константног интензитета и правца нормалног на штап.
Динамика крутог тела. Задаци за вежбу 1. Штап масе m и дужине L се крајем А наслања на храпаву хоризонталну раван, док на другом крају дејствује сила F константног интензитета и правца нормалног на штап.
PowerPoint Presentation
 МОБИЛНЕ МАШИНЕ II предавање 4.2 \ ослоно-кретни механизми на точковима, кинематика и динамика точка Кинематика точка обимна брзини точка: = t транслаторна брзина точка: = t Услов котрљања точка без проклизавања:
МОБИЛНЕ МАШИНЕ II предавање 4.2 \ ослоно-кретни механизми на точковима, кинематика и динамика точка Кинематика точка обимна брзини точка: = t транслаторна брзина точка: = t Услов котрљања точка без проклизавања:
Microsoft PowerPoint - Teorija kretanja vozila-predavanje 4.1.ppt
 ТЕОРИЈА КРЕТАЊА ВОЗИЛА Предавање 4.1 гусенична возила, отпори кретања, Код дефинисања параметара функција кретања возила на гусеницама разматрају се следећи случајеви кретања: а) праволиниjско кретање
ТЕОРИЈА КРЕТАЊА ВОЗИЛА Предавање 4.1 гусенична возила, отпори кретања, Код дефинисања параметара функција кретања возила на гусеницама разматрају се следећи случајеви кретања: а) праволиниjско кретање
9. : , ( )
") 9. Динамика тачке: Енергиjа, рад и снага (први део) др Ратко Маретић др Дамир Мађаревић Департман за Техничку механику, Факултет техничких наука Нови Сад Садржаj - Шта ћемо научити (1) 1. Преглед литературе
9. Динамика тачке: Енергиjа, рад и снага (први део) др Ратко Маретић др Дамир Мађаревић Департман за Техничку механику, Факултет техничких наука Нови Сад Садржаj - Шта ћемо научити (1) 1. Преглед литературе
Microsoft PowerPoint - predavanje_sile_primena_2013
 Примене Њутнових закона Претпоставке Објекти представљени материјалном тачком занемарите ротацију (за сада) Масе конопаца су занемариве Заинтересовани смо само за силе које делују на објекат можемо да
Примене Њутнових закона Претпоставке Објекти представљени материјалном тачком занемарите ротацију (за сада) Масе конопаца су занемариве Заинтересовани смо само за силе које делују на објекат можемо да
ДРУШТВО ФИЗИЧАРА СРБИЈЕ МИНИСТАРСТВО ПРОСВЕТЕ И СПОРТА РЕПУБЛИКЕ СРБИЈЕ Задаци за републичко такмичење ученика средњих школа 2006/2007 године I разред
 ДРУШТВО ФИЗИЧАРА СРБИЈЕ МИНИСТАРСТВО ПРОСВЕТЕ И СПОРТА РЕПУБЛИКЕ СРБИЈЕ Задаци за републичко такмичење ученика средњих школа 006/007 године разред. Електрични систем се састоји из отпорника повезаних тако
ДРУШТВО ФИЗИЧАРА СРБИЈЕ МИНИСТАРСТВО ПРОСВЕТЕ И СПОРТА РЕПУБЛИКЕ СРБИЈЕ Задаци за републичко такмичење ученика средњих школа 006/007 године разред. Електрични систем се састоји из отпорника повезаних тако
Proracun strukture letelica - Vežbe 6
 University of Belgrade Faculty of Mechanical Engineering Proračun strukture letelica Vežbe 6 15.4.2019. Mašinski fakultet Univerziteta u Beogradu Danilo M. Petrašinović Jelena M. Svorcan Miloš D. Petrašinović
University of Belgrade Faculty of Mechanical Engineering Proračun strukture letelica Vežbe 6 15.4.2019. Mašinski fakultet Univerziteta u Beogradu Danilo M. Petrašinović Jelena M. Svorcan Miloš D. Petrašinović
48. РЕПУБЛИЧКО ТАКМИЧЕЊЕ ИЗ ФИЗИКЕ УЧЕНИКА СРЕДЊИХ ШКОЛА ШКОЛСКЕ 2009/2010. ГОДИНЕ I РАЗРЕД Друштво Физичара Србије Министарство Просвете Републике Ср
 I РАЗРЕД Друштво Физичара Србије Министарство Просвете Републике Србије ЗАДАЦИ ГИМНАЗИЈА ВЕЉКО ПЕТРОВИЋ СОМБОР 7.0.00.. На слици је приказана шема електричног кола. Електромоторна сила извора је ε = 50
I РАЗРЕД Друштво Физичара Србије Министарство Просвете Републике Србије ЗАДАЦИ ГИМНАЗИЈА ВЕЉКО ПЕТРОВИЋ СОМБОР 7.0.00.. На слици је приказана шема електричног кола. Електромоторна сила извора је ε = 50
Studij Ime i prezime Broj bodova MATEMATIKA 2 1. dio, grupa A 1. kolokvij 12. travnja Kolokvij se sastoji od dva dijela koja se pi²u po 55 minut
 1. dio, grupa A 1. kolokvij 12. travnja 2019. Kolokvij se sastoji od dva dijela koja se pi²u po 55 minuta. Od pomagala su dopu²teni ravnala, trokuti, kutomjer i ²estar. Svaki zadatak se mora pisati na
1. dio, grupa A 1. kolokvij 12. travnja 2019. Kolokvij se sastoji od dva dijela koja se pi²u po 55 minuta. Od pomagala su dopu²teni ravnala, trokuti, kutomjer i ²estar. Svaki zadatak se mora pisati na
Ravno kretanje krutog tela
 Ravno kretanje krutog tela Brzine tačaka tela u reprezentativnom preseku Ubrzanja tačaka u reprezentativnom preseku Primer određivanja brzina i ubrzanja kod ravnog mehanizma Ravno kretanje krutog tela
Ravno kretanje krutog tela Brzine tačaka tela u reprezentativnom preseku Ubrzanja tačaka u reprezentativnom preseku Primer određivanja brzina i ubrzanja kod ravnog mehanizma Ravno kretanje krutog tela
Pismeni ispit iz MEHANIKE MATERIJALA I - grupa A 1. Kruta poluga AB, oslonjena na oprugu BC i okačena o uže BD, nosi kontinuirano opterećenje, kao što
 Pismeni ispit iz MEHNIKE MTERIJL I - grupa 1. Kruta poluga, oslonjena na oprugu i okačena o uže D, nosi kontinuirano opterećenje, kao što je prikazano na slici desno. Odrediti: a) silu i napon u užetu
Pismeni ispit iz MEHNIKE MTERIJL I - grupa 1. Kruta poluga, oslonjena na oprugu i okačena o uže D, nosi kontinuirano opterećenje, kao što je prikazano na slici desno. Odrediti: a) silu i napon u užetu
8. ( )
") 8. Кинематика тачке (криволиниjско кретање) др Ратко Маретић др Дамир Мађаревић Департман за Техничку механику, Факултет техничких наука Нови Сад Садржаj - Шта ћемо научити 1. Криволиниjско кретање Преглед
8. Кинематика тачке (криволиниjско кретање) др Ратко Маретић др Дамир Мађаревић Департман за Техничку механику, Факултет техничких наука Нови Сад Садржаj - Шта ћемо научити 1. Криволиниjско кретање Преглед
3. Neprekinute funkcije U ovoj to ki deniramo neprekinute funkcije. Slikovito, graf neprekinute funkcije moºemo nacrtati a da ne diºemo olovku s papir
 3. Neprekinute funkcije U ovoj to ki deniramo neprekinute funkcije. Slikovito, graf neprekinute funkcije moºemo nacrtati a da ne diºemo olovku s papira. Neprekinute funkcije vaºne su u teoriji i primjenama.
3. Neprekinute funkcije U ovoj to ki deniramo neprekinute funkcije. Slikovito, graf neprekinute funkcije moºemo nacrtati a da ne diºemo olovku s papira. Neprekinute funkcije vaºne su u teoriji i primjenama.
Microsoft PowerPoint - ravno kretanje [Compatibility Mode]
![Microsoft PowerPoint - ravno kretanje [Compatibility Mode]](/thumbs/99/142687321.jpg "Microsoft PowerPoint - ravno kretanje [Compatibility Mode]") КИНЕМАТИКА КРУТОГ ТЕЛ (наставак) 1. транслаторно кретање. обртање тела око непокретне осе 3. сферно кретање 4. опште кретање 5. раванско (равно) кретање 1 Opšte kretanje krutog tela = ( t) y = y( t) y
КИНЕМАТИКА КРУТОГ ТЕЛ (наставак) 1. транслаторно кретање. обртање тела око непокретне осе 3. сферно кретање 4. опште кретање 5. раванско (равно) кретање 1 Opšte kretanje krutog tela = ( t) y = y( t) y
Microsoft PowerPoint - STABILNOST KONSTRUKCIJA 2_18 [Compatibility Mode]
![Microsoft PowerPoint - STABILNOST KONSTRUKCIJA 2_18 [Compatibility Mode]](/thumbs/99/140947091.jpg "Microsoft PowerPoint - STABILNOST KONSTRUKCIJA 2_18 [Compatibility Mode]") 6. STABILNOST KONSTRUKCIJA II čas Marija Nefovska-Danilović 3. Stabilnost konstrukcija 1 6.2 Osnovne jednačine štapa 6.2.1 Linearna teorija štapa Važe pretpostavke o geometrijskoj (1), statičkoj (2) i
6. STABILNOST KONSTRUKCIJA II čas Marija Nefovska-Danilović 3. Stabilnost konstrukcija 1 6.2 Osnovne jednačine štapa 6.2.1 Linearna teorija štapa Važe pretpostavke o geometrijskoj (1), statičkoj (2) i
ИСПИТНА ПИТАЊА ЗА ПРВИ КОЛОКВИЈУМ 1. Шта проучава биофизика и навести бар 3 области биофизике 2. Основне физичке величине и њихове јединице 3. Појам м
 ИСПИТНА ПИТАЊА ЗА ПРВИ КОЛОКВИЈУМ 1. Шта проучава биофизика и навести бар 3 области биофизике 2. Основне физичке величине и њихове јединице 3. Појам материјалне тачке 4. Појам механичког система 5. Појам
ИСПИТНА ПИТАЊА ЗА ПРВИ КОЛОКВИЈУМ 1. Шта проучава биофизика и навести бар 3 области биофизике 2. Основне физичке величине и њихове јединице 3. Појам материјалне тачке 4. Појам механичког система 5. Појам
Predavanje 8-TEMELJI I POTPORNI ZIDOVI.ppt
 1 BETONSKE KONSTRUKCIJE TEMELJI OBJEKATA Prof. dr Snežana Marinković Doc. dr Ivan Ignjatović Semestar: V ESPB: Temelji objekata 2 1.1. Podela 1.2. Temelji samci 1.3. Temeljne trake 1.4. Temeljne grede
1 BETONSKE KONSTRUKCIJE TEMELJI OBJEKATA Prof. dr Snežana Marinković Doc. dr Ivan Ignjatović Semestar: V ESPB: Temelji objekata 2 1.1. Podela 1.2. Temelji samci 1.3. Temeljne trake 1.4. Temeljne grede
Microsoft PowerPoint - Teorija kretanja vozila-predavanje 3.1.ppt
 ТЕОРИЈА КРЕТАЊА ВОЗИЛА Предавање. гусенична возила, површински притисак ослањања, гусеница на подлогу ослањања G=mg p p гусеница на подлогу ослањања G=mg средњи стварни p тврда подлога средњи стварни p
ТЕОРИЈА КРЕТАЊА ВОЗИЛА Предавање. гусенична возила, површински притисак ослањања, гусеница на подлогу ослањања G=mg p p гусеница на подлогу ослањања G=mg средњи стварни p тврда подлога средњи стварни p
Microsoft PowerPoint - fizika2-kinematika2012
 ФИЗИКА 1. Понедељак, 8. октобар, 1. Кинематика тачке у једној димензији Кинематикакретањаудведимензије 1 Кинематика кретање свејеустањукретања кретање промена положаја тела (уодносу на друга тела) три
ФИЗИКА 1. Понедељак, 8. октобар, 1. Кинематика тачке у једној димензији Кинематикакретањаудведимензије 1 Кинематика кретање свејеустањукретања кретање промена положаја тела (уодносу на друга тела) три
PRIMER 1 ISPITNI ZADACI 1. ZADATAK Teret težine G = 2 [kn] vezan je užadima DB i DC. Za ravnotežni položaj odrediti sile u užadima. = 60 o, β = 120 o
![PRIMER 1 ISPITNI ZADACI 1. ZADATAK Teret težine G = 2 [kn] vezan je užadima DB i DC. Za ravnotežni položaj odrediti sile u užadima. = 60 o, β = 120 o](/thumbs/102/155855156.jpg "PRIMER 1 ISPITNI ZADACI 1. ZADATAK Teret težine G = 2 [kn] vezan je užadima DB i DC. Za ravnotežni položaj odrediti sile u užadima. = 60 o, β = 120 o") PRIMER 1 ISPITNI ZADACI Teret težine G = 2 [kn] vezan je užadima DB i DC. Za ravnotežni položaj odrediti sile u užadima. = 60 o, β = 120 o Homogena pločica ACBD, težine G, sa težištem u tački C, dobijena
PRIMER 1 ISPITNI ZADACI Teret težine G = 2 [kn] vezan je užadima DB i DC. Za ravnotežni položaj odrediti sile u užadima. = 60 o, β = 120 o Homogena pločica ACBD, težine G, sa težištem u tački C, dobijena
Seminar 13 (Tok funkcije) Obavezna priprema za seminar nalazi se na drugoj stranici ovog materijala. Ove materijale obražujemo na seminarima do kraja
 Obavezna priprema za seminar nalazi se na drugoj stranici ovog materijala. Ove materijale obražujemo na seminarima do kraja") Seminar 13 (Tok funkcije) Obavezna priprema za seminar nalazi se na drugoj stranici ovog materijala. Ove materijale obražujemo na seminarima do kraja semestra. Potrebno predznanje Ovaj seminar saºima sva
Seminar 13 (Tok funkcije) Obavezna priprema za seminar nalazi se na drugoj stranici ovog materijala. Ove materijale obražujemo na seminarima do kraja semestra. Potrebno predznanje Ovaj seminar saºima sva
Primjena neodredenog integrala u inženjerstvu Matematika 2 Erna Begović Kovač, Literatura: I. Gusić, Lekcije iz Matematike 2
 Primjena neodredenog integrala u inženjerstvu Matematika 2 Erna Begović Kovač, 2019. Literatura: I. Gusić, Lekcije iz Matematike 2 http://matematika.fkit.hr Uvod Ako su dvije veličine x i y povezane relacijom
Primjena neodredenog integrala u inženjerstvu Matematika 2 Erna Begović Kovač, 2019. Literatura: I. Gusić, Lekcije iz Matematike 2 http://matematika.fkit.hr Uvod Ako su dvije veličine x i y povezane relacijom
Energetski pretvarači 1 Februar zadatak (18 poena) Kondenzator C priključen je paralelno faznom regulatoru u cilju kompenzacije reaktivne sna
 Kondenzator C priključen je paralelno faznom regulatoru u cilju kompenzacije reaktivne sna") 1. zadatak (18 poena) Kondenzator C priključen je paralelno faznom regulatoru u cilju kompenzacije reaktivne snage osnovnog harmonika. Induktivnost prigušnice jednaka je L = 10 mh, frekvencija mrežnog
1. zadatak (18 poena) Kondenzator C priključen je paralelno faznom regulatoru u cilju kompenzacije reaktivne snage osnovnog harmonika. Induktivnost prigušnice jednaka je L = 10 mh, frekvencija mrežnog
Microsoft Word - Elektrijada_V2_2014_final.doc
 I област. У колу сталне струје са слике када је и = V, амперметар показује I =. Одредити показивање амперметра I када је = 3V и = 4,5V. Решење: а) I = ) I =,5 c) I =,5 d) I = 7,5 3 3 Слика. I област. Дата
I област. У колу сталне струје са слике када је и = V, амперметар показује I =. Одредити показивање амперметра I када је = 3V и = 4,5V. Решење: а) I = ) I =,5 c) I =,5 d) I = 7,5 3 3 Слика. I област. Дата
Analiticka geometrija
 Analitička geometrija Predavanje 4 Ekscentricitet konusnih preseka i klasifikacija kvadratnih krivih Novi Sad, 2018. Milica Žigić (PMF, UNS 2018) Analitička geometrija predavanje 4 1 / 15 Ekscentricitet
Analitička geometrija Predavanje 4 Ekscentricitet konusnih preseka i klasifikacija kvadratnih krivih Novi Sad, 2018. Milica Žigić (PMF, UNS 2018) Analitička geometrija predavanje 4 1 / 15 Ekscentricitet
STABILNOST SISTEMA
 STABILNOST SISTEMA Najvaznija osobina sistema automatskog upravljanja je stabilnost. Generalni zahtev koji se postavlja pred projektanta jeste da projektovani i realizovani sistem automatskog upravljanja
STABILNOST SISTEMA Najvaznija osobina sistema automatskog upravljanja je stabilnost. Generalni zahtev koji se postavlja pred projektanta jeste da projektovani i realizovani sistem automatskog upravljanja
Mate_Izvodi [Compatibility Mode]
![Mate_Izvodi [Compatibility Mode]](/thumbs/102/155170958.jpg "Mate_Izvodi [Compatibility Mode]") ИЗВОДИ ФУНКЦИЈЕ ИЗВОДИ ФУНКЦИЈЕ Нека тачке Мо и М чине једну тетиву функције. Нека се тачка М почне приближавати тачки Мо, тј. нека Тачка М постаје тачка Мо, а тетива постаје тангента функције у тачки
ИЗВОДИ ФУНКЦИЈЕ ИЗВОДИ ФУНКЦИЈЕ Нека тачке Мо и М чине једну тетиву функције. Нека се тачка М почне приближавати тачки Мо, тј. нека Тачка М постаје тачка Мо, а тетива постаје тангента функције у тачки
Analiticka geometrija
 Analitička geometrija Predavanje 3 Konusni preseci (krive drugog reda, kvadratne krive) Novi Sad, 2018. Milica Žigić (PMF, UNS 2018) Analitička geometrija predavanje 3 1 / 22 Ime s obzirom na karakteristike
Analitička geometrija Predavanje 3 Konusni preseci (krive drugog reda, kvadratne krive) Novi Sad, 2018. Milica Žigić (PMF, UNS 2018) Analitička geometrija predavanje 3 1 / 22 Ime s obzirom na karakteristike
TEORIJA SIGNALA I INFORMACIJA
 Multiple Input/Multiple Output sistemi MIMO sistemi Ulazi (pobude) Izlazi (odzivi) u 1 u 2 y 1 y 2 u k y r Obrada=Matematički model Načini realizacije: fizički sistemi (hardware) i algoritmi (software)
Multiple Input/Multiple Output sistemi MIMO sistemi Ulazi (pobude) Izlazi (odzivi) u 1 u 2 y 1 y 2 u k y r Obrada=Matematički model Načini realizacije: fizički sistemi (hardware) i algoritmi (software)
Microsoft Word - Dopunski_zadaci_iz_MFII_uz_III_kolokvij.doc
 Dopunski zadaci za vježbu iz MFII Za treći kolokvij 1. U paralelno strujanje fluida gustoće ρ = 999.8 kg/m viskoznosti μ = 1.1 1 Pa s brzinom v = 1.6 m/s postavljana je ravna ploča duljine =.7 m (u smjeru
Dopunski zadaci za vježbu iz MFII Za treći kolokvij 1. U paralelno strujanje fluida gustoće ρ = 999.8 kg/m viskoznosti μ = 1.1 1 Pa s brzinom v = 1.6 m/s postavljana je ravna ploča duljine =.7 m (u smjeru
Otpornost materijala
 Prethodno predavanje Statika je deo mehanike koji se bavi: OdreĎivanjem uslova ravnoteţe krutih tela koja su izloţena mehaničkom dejstvu Slaganjem sila i svoďenjem sistema na prostiji Korišćeni i definisani
Prethodno predavanje Statika je deo mehanike koji se bavi: OdreĎivanjem uslova ravnoteţe krutih tela koja su izloţena mehaničkom dejstvu Slaganjem sila i svoďenjem sistema na prostiji Korišćeni i definisani
Microsoft PowerPoint - STABILNOST KONSTRUKCIJA 4_19 [Compatibility Mode]
![Microsoft PowerPoint - STABILNOST KONSTRUKCIJA 4_19 [Compatibility Mode]](/thumbs/99/141489570.jpg "Microsoft PowerPoint - STABILNOST KONSTRUKCIJA 4_19 [Compatibility Mode]") Univerzitet u Beogradu Građevinski fakutet Katedra za tehničku mehaniku i teoriju konstrukcija STABILNOST KONSTRUKCIJA IV ČAS V. PROF. DR MARIJA NEFOVSKA DANILOVIĆ 3. SABILNOST KONSTRUKCIJA 1 Geometrijska
Univerzitet u Beogradu Građevinski fakutet Katedra za tehničku mehaniku i teoriju konstrukcija STABILNOST KONSTRUKCIJA IV ČAS V. PROF. DR MARIJA NEFOVSKA DANILOVIĆ 3. SABILNOST KONSTRUKCIJA 1 Geometrijska
Microsoft PowerPoint - KoMoMa -predavanje Definisanje alata masina
 КОНСТРУИСАЊЕ МОБИЛНИХ МАШИНА Треће предавање дефинисање алата машина, кашике мини багера Кнематички ланци: E z = { L 1,L a) прости, б) разгранати, в) сложени,...,l n } а) L 1 б) L L n L 3 O 1 L o O n L
КОНСТРУИСАЊЕ МОБИЛНИХ МАШИНА Треће предавање дефинисање алата машина, кашике мини багера Кнематички ланци: E z = { L 1,L a) прости, б) разгранати, в) сложени,...,l n } а) L 1 б) L L n L 3 O 1 L o O n L
Seminar peti i ²esti U sljede a dva seminara rije²avamo integrale postavljene u prosturu trostruke integrale. Studenti vjeºbom trebaju razviti sposobn
 Seminar peti i ²esti U sljede a dva seminara rije²avamo integrale postavljene u prosturu trostruke integrale. Studenti vjeºbom trebaju razviti sposobnost vizualizacije dijela prostora i skiciranja dvodimenzionalnih
Seminar peti i ²esti U sljede a dva seminara rije²avamo integrale postavljene u prosturu trostruke integrale. Studenti vjeºbom trebaju razviti sposobnost vizualizacije dijela prostora i skiciranja dvodimenzionalnih
Analiticka geometrija
 Analitička geometrija Predavanje 8 Vektori u prostoru. Skalarni proizvod vektora Novi Sad, 2018. Milica Žigić (PMF, UNS 2018) Analitička geometrija predavanje 8 1 / 11 Vektori u prostoru i pravougli koordinatni
Analitička geometrija Predavanje 8 Vektori u prostoru. Skalarni proizvod vektora Novi Sad, 2018. Milica Žigić (PMF, UNS 2018) Analitička geometrija predavanje 8 1 / 11 Vektori u prostoru i pravougli koordinatni
Microsoft PowerPoint - ME_P1-Uvodno predavanje [Compatibility Mode]
![Microsoft PowerPoint - ME_P1-Uvodno predavanje [Compatibility Mode]](/thumbs/103/157430298.jpg "Microsoft PowerPoint - ME_P1-Uvodno predavanje [Compatibility Mode]") MAŠINSKI ELEMENTI dr Miloš Ristić UVOD Mašinski elementi predstavljaju tehničkonaučnu disciplinu. Izučavanjem ove discipline stiču seteorijska i praktična znanja za proračun, izbor i primenu mašinskih
MAŠINSKI ELEMENTI dr Miloš Ristić UVOD Mašinski elementi predstavljaju tehničkonaučnu disciplinu. Izučavanjem ove discipline stiču seteorijska i praktična znanja za proračun, izbor i primenu mašinskih
Romanian Master of Physics 2013 Теоријски задатак 1 (10 поена) Каменобил Фред и Барни су направили аутомобил чији су точкови две идентичне призме са к
 Каменобил Фред и Барни су направили аутомобил чији су точкови две идентичне призме са к") Теоријски задатак 1 (1 поена) Каменобил Фред и Барни су направили аутомобил чији су точкови две идентичне призме са квадратном основом (слика 1). Аутомобил се креће по путу који се састоји од идентичних
Теоријски задатак 1 (1 поена) Каменобил Фред и Барни су направили аутомобил чији су точкови две идентичне призме са квадратном основом (слика 1). Аутомобил се креће по путу који се састоји од идентичних
LINEARNA ALGEBRA 2 Popravni kolokvij srijeda, 13. velja e Zadatak 1. ( 7 + 5=12 bodova) Zadan je potprostor L = {(x 1, x 2, x 3, x 4 ) C 4 : x 1
 Zadan je potprostor L = {(x 1, x 2, x 3, x 4 ) C 4 : x 1") Zadatak 1. ( 7 + 5=12 bodova) Zadan je potprostor L = {(x 1, x 2, x, x 4 ) C 4 : x 1 + x 2 + x = 0, x 1 = 2x 2 } unitarnog prostora C 4 sa standardnim skalarnim produktom i vektor v = (2i, 1, i, ) C 4.
Zadatak 1. ( 7 + 5=12 bodova) Zadan je potprostor L = {(x 1, x 2, x, x 4 ) C 4 : x 1 + x 2 + x = 0, x 1 = 2x 2 } unitarnog prostora C 4 sa standardnim skalarnim produktom i vektor v = (2i, 1, i, ) C 4.
FTN Novi Sad Katedra za motore i vozila Potrošnja goriva Teorija kretanja drumskih vozila Potrošnja goriva
 Ključni faktori: 1. ENERGIJA potrebna za kretanje vozila na određenoj deonici puta Povećanje E K pri ubrzavanju, pri penjanju, kompenzacija energetskih gubitaka usled dejstva F f i F W Zavisi od parametara
Ključni faktori: 1. ENERGIJA potrebna za kretanje vozila na određenoj deonici puta Povećanje E K pri ubrzavanju, pri penjanju, kompenzacija energetskih gubitaka usled dejstva F f i F W Zavisi od parametara
mfb_april_2018_res.dvi
 Универзитет у Београду Машински факултет Катедра за механику флуида МЕХАНИКА ФЛУИДА Б Писмени део испита Име и презиме:... Броj индекса:... Напомене: Испит траjе 80 минута. Коришћење литературе ниjе дозвољено!
Универзитет у Београду Машински факултет Катедра за механику флуида МЕХАНИКА ФЛУИДА Б Писмени део испита Име и презиме:... Броj индекса:... Напомене: Испит траjе 80 минута. Коришћење литературе ниjе дозвољено!
1 Konusni preseci (drugim rečima: kružnica, elipsa, hiperbola i parabola) Definicija 0.1 Algebarska kriva drugog reda u ravni jeste skup tačaka opisan
 Definicija 0.1 Algebarska kriva drugog reda u ravni jeste skup tačaka opisan") 1 Konusni preseci (drugim rečima: kružnica, elipsa, hiperbola i parabola) Definicija 0.1 Algebarska kriva drugog reda u ravni jeste skup tačaka opisan jednačinom oblika: a 11 x 2 + 2a 12 xy + a 22 y 2
1 Konusni preseci (drugim rečima: kružnica, elipsa, hiperbola i parabola) Definicija 0.1 Algebarska kriva drugog reda u ravni jeste skup tačaka opisan jednačinom oblika: a 11 x 2 + 2a 12 xy + a 22 y 2
M e h a n i k a 1 v e ž b e 4 / 2 9 Primer 3.5 Za prostu gredu prikazanu na slici odrediti otpore oslonaca i nacrtati osnovne statičke dijagrame. Pozn
 M e h a n i k a 1 v e ž b e 4 / 9 Primer 3.5 Za prostu gredu prikazanu na slici odrediti otpore oslonaca i nacrtati osnovne statičke dijagrame. Poznata su opterećenja F 1 = kn, F = 1kN, M 1 = knm, q =
M e h a n i k a 1 v e ž b e 4 / 9 Primer 3.5 Za prostu gredu prikazanu na slici odrediti otpore oslonaca i nacrtati osnovne statičke dijagrame. Poznata su opterećenja F 1 = kn, F = 1kN, M 1 = knm, q =
ТЕСТ ИЗ ФИЗИКЕ ИМЕ И ПРЕЗИМЕ 1. У основне величине у физици, по Међународном систему јединица, спадају и следеће три величине : а) маса, температура,
 маса, температура,") ТЕСТ ИЗ ФИЗИКЕ ИМЕ И ПРЕЗИМЕ 1. У основне величине у физици, по Међународном систему јединица, спадају и следеће три величине : а) маса, температура, електрични отпор б) сила, запремина, дужина г) маса,
ТЕСТ ИЗ ФИЗИКЕ ИМЕ И ПРЕЗИМЕ 1. У основне величине у физици, по Међународном систему јединица, спадају и следеће три величине : а) маса, температура, електрични отпор б) сила, запремина, дужина г) маса,
Matematka 1 Zadaci za vežbe Oktobar Uvod 1.1. Izračunati vrednost izraza (bez upotrebe pomoćnih sredstava): ( ) [ a) : b) 3 3
: ( ) [ a) : b) 3 3") Matematka Zadaci za vežbe Oktobar 5 Uvod.. Izračunati vrednost izraza bez upotrebe pomoćnih sredstava): ) [ a) 98.8.6 : b) : 7 5.5 : 8 : ) : :.. Uprostiti izraze: a) b) ) a b a+b + 6b a 9b + y+z c) a +b
Matematka Zadaci za vežbe Oktobar 5 Uvod.. Izračunati vrednost izraza bez upotrebe pomoćnih sredstava): ) [ a) 98.8.6 : b) : 7 5.5 : 8 : ) : :.. Uprostiti izraze: a) b) ) a b a+b + 6b a 9b + y+z c) a +b
Uvod u obične diferencijalne jednadžbe Metoda separacije varijabli Obične diferencijalne jednadžbe Franka Miriam Brückler
 Obične diferencijalne jednadžbe Franka Miriam Brückler Primjer Deriviranje po x je linearan operator d dx kojemu recimo kao domenu i kodomenu uzmemo (beskonačnodimenzionalni) vektorski prostor funkcija
Obične diferencijalne jednadžbe Franka Miriam Brückler Primjer Deriviranje po x je linearan operator d dx kojemu recimo kao domenu i kodomenu uzmemo (beskonačnodimenzionalni) vektorski prostor funkcija
IErica_ActsUp_paged.qxd
 Dnevnik šonjavka D`ef Kini Za D`u li, Vi la i Gran ta SEP TEM BAR P o n e d e l j a k Pret po sta vljam da je ma ma bi la a vol ski po no - sna na sa mu se be {to me je na te ra la da pro - {le go di ne
Dnevnik šonjavka D`ef Kini Za D`u li, Vi la i Gran ta SEP TEM BAR P o n e d e l j a k Pret po sta vljam da je ma ma bi la a vol ski po no - sna na sa mu se be {to me je na te ra la da pro - {le go di ne
Microsoft Word - SRPS Z-S2-235.doc
 SRPSKI STANDARD SRPS Z.S2.235 Jul 2008. Saobraćajno-tehnička oprema javnih puteva Smerokazi Traffic guiding equipment Delineators INSTITUT ZA STANDARDIZACIJU SRBIJE III izdanje Referentna oznaka SRPS Z.S2.235:2008
SRPSKI STANDARD SRPS Z.S2.235 Jul 2008. Saobraćajno-tehnička oprema javnih puteva Smerokazi Traffic guiding equipment Delineators INSTITUT ZA STANDARDIZACIJU SRBIJE III izdanje Referentna oznaka SRPS Z.S2.235:2008
3.11. Судари
 3.1. Судари Под сударом два тела подразумева се нагла промена стања кретања ти У првој фази, тела се релативно приближавају и сударају уз еластичну или нееластичну деформацију, док им брзине опадају до
3.1. Судари Под сударом два тела подразумева се нагла промена стања кретања ти У првој фази, тела се релативно приближавају и сударају уз еластичну или нееластичну деформацију, док им брзине опадају до
Rucka.dft
 Средња машинска школа РАДОЈЕ ДАКИЋ АУТОДИЗАЛИЦА ТАРА Милош Мајсторовић Средња машинска Прорачун: школа Аутодизалице " Тара " Пројекат РАДОЈЕ ДАКИЋ Лист ПРОРАЧУН НОСИВОСТИ АУТОДИЗАЛИЦЕ " ТАРА " ПОДАЦИ:
Средња машинска школа РАДОЈЕ ДАКИЋ АУТОДИЗАЛИЦА ТАРА Милош Мајсторовић Средња машинска Прорачун: школа Аутодизалице " Тара " Пројекат РАДОЈЕ ДАКИЋ Лист ПРОРАЧУН НОСИВОСТИ АУТОДИЗАЛИЦЕ " ТАРА " ПОДАЦИ:
Rešetkasti nosači
 Kombinovana naprezanja etalne konstrukcije 1 P8-1 Kontrole graničnih stanja kod kombinovanih naprezanja Ekscentrično zatezanje ( t + ) ULS - kontrole nosivosti poprečnih preseka na pojedinačna dejstva
Kombinovana naprezanja etalne konstrukcije 1 P8-1 Kontrole graničnih stanja kod kombinovanih naprezanja Ekscentrično zatezanje ( t + ) ULS - kontrole nosivosti poprečnih preseka na pojedinačna dejstva
ЕНЕРГЕТСКИ ПРЕТВАРАЧИ септембар 2005
 ЕНЕРГЕТСКИ ПРЕТВАРАЧИ јануар 0. год.. Потрошач чија је привидна снага S =500kVA и фактор снаге cosφ=0.8 (индуктивно) прикључен је на мрежу 3x380V, 50Hz. У циљу компензације реактивне снаге, паралелно са
ЕНЕРГЕТСКИ ПРЕТВАРАЧИ јануар 0. год.. Потрошач чија је привидна снага S =500kVA и фактор снаге cosφ=0.8 (индуктивно) прикључен је на мрежу 3x380V, 50Hz. У циљу компензације реактивне снаге, паралелно са
Београд, МАТРИЧНА АНАЛИЗА КОНСТРУКЦИЈА ЗАДАТАК 1 За носач приказан на слици: а) одредити дужине извијања свих штапова носача, ако на носач
 одредити дужине извијања свих штапова носача, ако на носач") Београд, 30.01.2016. а) одредити дужине извијања свих штапова носача, ако на носач делују само концентрисане силе, б) ако је P = 0.8P cr, и на носач делује расподељено оптерећење f, одредити моменат савијања
Београд, 30.01.2016. а) одредити дужине извијања свих штапова носача, ако на носач делују само концентрисане силе, б) ако је P = 0.8P cr, и на носач делује расподељено оптерећење f, одредити моменат савијања
RG_V_05_Transformacije 3D
 Računarska grafika - vežbe 5 Transformacije u 3D grafici Transformacije u 3D grafici Slično kao i u D grafici, uz razlike: matrice su 4x4 postoji posebna matrica projekcije Konvencije: desni pravougli
Računarska grafika - vežbe 5 Transformacije u 3D grafici Transformacije u 3D grafici Slično kao i u D grafici, uz razlike: matrice su 4x4 postoji posebna matrica projekcije Konvencije: desni pravougli
Slide 1
 Грађевински факултет Универзитета у Београду МОСТОВИ Субструктура моста Вежбе 4 Програм предмета Датум бч. Предавања бч. Вежбе 1 22.02. 4 Уводно предавање - 2 01.03. 3 Дефиниције, системи, распони и материјали
Грађевински факултет Универзитета у Београду МОСТОВИ Субструктура моста Вежбе 4 Програм предмета Датум бч. Предавања бч. Вежбе 1 22.02. 4 Уводно предавање - 2 01.03. 3 Дефиниције, системи, распони и материјали
АНАЛИЗА ПРОБЛЕМА ТЕРМИЧКЕ ДИЛАТАЦИЈЕ L КОМПЕНЗАТОРА ПРЕМА СТАНДАРДУ AD 2000 И ДРУГИМ МЕТОДАМА Милан Травица Иновациони центар Машински факултет Универ
 АНАЛИЗА ПРОБЛЕМА ТЕРМИЧКЕ ДИЛАТАЦИЈЕ L КОМПЕНЗАТОРА ПРЕМА СТАНДАРДУ AD 2000 И ДРУГИМ МЕТОДАМА Милан Травица Иновациони центар Машински факултет Универзитет у Београду Краљице Марије 16, 11000 Београд mtravica@mas.bg.ac.rs
АНАЛИЗА ПРОБЛЕМА ТЕРМИЧКЕ ДИЛАТАЦИЈЕ L КОМПЕНЗАТОРА ПРЕМА СТАНДАРДУ AD 2000 И ДРУГИМ МЕТОДАМА Милан Травица Иновациони центар Машински факултет Универзитет у Београду Краљице Марије 16, 11000 Београд mtravica@mas.bg.ac.rs
?? ????????? ?????????? ?????? ?? ????????? ??????? ???????? ?? ??????? ??????:
 РЈЕШЕЊА ЗАДАТАКА СА ТАКМИЧЕЊА ИЗ ЕЛЕКТРИЧНИХ МАШИНА Електријада 003 АСИНХРОНЕ МАШИНЕ Трофазни асинхрони мотор са намотаним ротором има податке: 380V 10A cos ϕ 08 Y 50Hz p отпор статора R s Ω Мотор је испитан
РЈЕШЕЊА ЗАДАТАКА СА ТАКМИЧЕЊА ИЗ ЕЛЕКТРИЧНИХ МАШИНА Електријада 003 АСИНХРОНЕ МАШИНЕ Трофазни асинхрони мотор са намотаним ротором има податке: 380V 10A cos ϕ 08 Y 50Hz p отпор статора R s Ω Мотор је испитан
Microsoft Word - Elektrijada_2008.doc
 I област. У колу сталне струје са слике познато је: а) када је E, E = и E = укупна снага 3 отпорника је P = W, б) када је E =, E и E = укупна снага отпорника је P = 4 W и 3 в) када је E =, E = и E укупна
I област. У колу сталне струје са слике познато је: а) када је E, E = и E = укупна снага 3 отпорника је P = W, б) када је E =, E и E = укупна снага отпорника је P = 4 W и 3 в) када је E =, E = и E укупна
ПОДЈЕЛА ТЛА ПРЕМА ВЕЛИЧИНИ ЗРНА
 -1- СМИЧУЋА ЧВРСТОЋА ТЛА Смичућа чврстоћа представља највећи смичући напон који се може нанијети структури тла у одређеном правцу. Када је достигнут највећи могућ смичући напон, праћен пластичним деформацијама,
-1- СМИЧУЋА ЧВРСТОЋА ТЛА Смичућа чврстоћа представља највећи смичући напон који се може нанијети структури тла у одређеном правцу. Када је достигнут највећи могућ смичући напон, праћен пластичним деформацијама,
Z A K O N O SUDSKIM VEŠTACIMA I. UVODNE ODREDBE lan 1. Ovim zakonom ure uju se uslovi za obavljanje vešta enja, postupak imenovanja i razrešenja sudsk
 Z A K O N O SUDSKIM VEŠTACIMA I. UVODNE ODREDBE lan 1. Ovim zakonom ure uju se uslovi za obavljanje vešta enja, postupak imenovanja i razrešenja sudskih veštaka (u daljem tekstu: veštak), postupak upisa
Z A K O N O SUDSKIM VEŠTACIMA I. UVODNE ODREDBE lan 1. Ovim zakonom ure uju se uslovi za obavljanje vešta enja, postupak imenovanja i razrešenja sudskih veštaka (u daljem tekstu: veštak), postupak upisa
Univerzitet u Beogradu Elektrotehnički fakultet Katedra za energetske pretvarače i pogone ISPIT IZ SINHRONIH MAŠINA (13E013SIM) 1. Poznati su podaci o
 1. Poznati su podaci o") Univerzitet u Beogradu Elektrotehnički akultet Katedra za energetske pretvarače i pogone ISPIT IZ SINHRONIH MAŠINA (13E013SIM) 1. Poznati su podaci o namotaju statora sinhronog motora sa stalnim magnetima
Univerzitet u Beogradu Elektrotehnički akultet Katedra za energetske pretvarače i pogone ISPIT IZ SINHRONIH MAŠINA (13E013SIM) 1. Poznati su podaci o namotaju statora sinhronog motora sa stalnim magnetima
Slide 1
 Завод за унапређивање образовања и васпитања Аутори: Наставни предмет: MилојеЂурић,професор,Техничка школа Шабац, Марија Пилиповић,професор, Техничка школа Шабац, Александар Ђурић,професор,Мачванска средња
Завод за унапређивање образовања и васпитања Аутори: Наставни предмет: MилојеЂурић,професор,Техничка школа Шабац, Марија Пилиповић,професор, Техничка школа Шабац, Александар Ђурић,професор,Мачванска средња
PowerPoint Presentation
 МОБИЛНЕ МАШИНЕ I предавање. \ хидродинамичке трансмисије, компоненте, вучне карактеристике Хидродинамичке трансмисије мобилних машина општа концепција: v v v v - дизел мотор -хидродинамички претварач -
МОБИЛНЕ МАШИНЕ I предавање. \ хидродинамичке трансмисије, компоненте, вучне карактеристике Хидродинамичке трансмисије мобилних машина општа концепција: v v v v - дизел мотор -хидродинамички претварач -
Microsoft PowerPoint - GeoInfLEKCIJA2 [Compatibility Mode]
![Microsoft PowerPoint - GeoInfLEKCIJA2 [Compatibility Mode]](/thumbs/100/144690952.jpg "Microsoft PowerPoint - GeoInfLEKCIJA2 [Compatibility Mode]") Oblik i veličina Zemlje Datumi, projekcije, koordinatni sistemi Kako definišemo oblik Zemlje? Mi mislimo da je Zemlja sfera U stvari ona je sferoid (elipsoid), koji ima nešto malo veći radijus na ekvatoru
Oblik i veličina Zemlje Datumi, projekcije, koordinatni sistemi Kako definišemo oblik Zemlje? Mi mislimo da je Zemlja sfera U stvari ona je sferoid (elipsoid), koji ima nešto malo veći radijus na ekvatoru
Microsoft Word - IZVOD FUNKCIJE.doc
 IZVOD FUNKCIJE Predpotavimo da je funkcija f( definiana u nekom intervalu (a,b i da je tačka iz intervala (a,b fikirana. Uočimo neku proizvoljnu tačku iz tog intervala (a,b. Ova tačka može da e pomera
IZVOD FUNKCIJE Predpotavimo da je funkcija f( definiana u nekom intervalu (a,b i da je tačka iz intervala (a,b fikirana. Uočimo neku proizvoljnu tačku iz tog intervala (a,b. Ova tačka može da e pomera
OБЛАСТ: БЕЗБЕДНОСТ САОБРАЋАЈА ВЕШТАЧЕЊЕ САОБРАЋАЈНИХ НЕЗГОДА 1. Израчунати зауставни пут (Sz) и време заустављања ако су познати следећи подаци: брзин
 и време заустављања ако су познати следећи подаци: брзин") OБЛАСТ: БЕЗБЕДНОСТ САОБРАЋАЈА ВЕШТАЧЕЊЕ САОБРАЋАЈНИХ НЕЗГОДА 1. Израчунати зауставни пут (Sz) и време заустављања ако су познати следећи подаци: брзина аутомобила пре предузетог кочења Vo = 68 km/, успорење
OБЛАСТ: БЕЗБЕДНОСТ САОБРАЋАЈА ВЕШТАЧЕЊЕ САОБРАЋАЈНИХ НЕЗГОДА 1. Израчунати зауставни пут (Sz) и време заустављања ако су познати следећи подаци: брзина аутомобила пре предузетог кочења Vo = 68 km/, успорење
8. predavanje Vladimir Dananić 17. travnja Vladimir Dananić () 8. predavanje 17. travnja / 14
 8. predavanje 17. travnja / 14") 8. predavanje Vladimir Dananić 17. travnja 2012. Vladimir Dananić () 8. predavanje 17. travnja 2012. 1 / 14 Sadržaj 1 Izmjenični napon i izmjenična struja Inducirani napon 2 3 Izmjenični napon Vladimir
8. predavanje Vladimir Dananić 17. travnja 2012. Vladimir Dananić () 8. predavanje 17. travnja 2012. 1 / 14 Sadržaj 1 Izmjenični napon i izmjenična struja Inducirani napon 2 3 Izmjenični napon Vladimir
PARCIJALNO MOLARNE VELIČINE
 PARCIJALNE MOLARNE VELIČINE ZATVOREN TERMODINAMIČKI SISTEM-konstantan sastav sistema Posmatra se neka termodinamička ekstenzivna veličina X X (V, U, H, G, A, S) X je u funkciji bilo kog para intenzivnih
PARCIJALNE MOLARNE VELIČINE ZATVOREN TERMODINAMIČKI SISTEM-konstantan sastav sistema Posmatra se neka termodinamička ekstenzivna veličina X X (V, U, H, G, A, S) X je u funkciji bilo kog para intenzivnih
Eлeмeнти зa вeзу Универзитет у Новом Саду, Факултет техничких наука Департман за механизацију и конструкционо машинство Катедра за маш. елементе, теор
 Eлeмeнти зa вeзу Слајд 1 Eлементи за везу У oпштe мaшинскe eлeмeнтe спaдajу: eлeмeнти зa вeзу (зaвртњи, зaкивци, зaвaрeни спojeви, зaлeмљeни спojeви, зaлeпљeни спojeви, прeсoвaни спojeви, спojeви клинoм,
Eлeмeнти зa вeзу Слајд 1 Eлементи за везу У oпштe мaшинскe eлeмeнтe спaдajу: eлeмeнти зa вeзу (зaвртњи, зaкивци, зaвaрeни спojeви, зaлeмљeни спojeви, зaлeпљeни спojeви, прeсoвaни спojeви, спojeви клинoм,
M e h a n i k a 1 v e ž b e 4 /1 1 Primer 3.1 Za prostu gredu prikazanu na slici odrediti otpore oslonaca i nacrtati osnovne statičke dijagrame. q = 0
 M e h a n i k a 1 v e ž b e 4 /1 1 Primer 3.1 Za prostu gredu prikazanu na slici odrediti otpore oslonaca i nacrtati osnovne statičke dijagrame. q = 0.8 kn m, L=4m. 1. Z i = Z A = 0. Y i = Y A L q + F
M e h a n i k a 1 v e ž b e 4 /1 1 Primer 3.1 Za prostu gredu prikazanu na slici odrediti otpore oslonaca i nacrtati osnovne statičke dijagrame. q = 0.8 kn m, L=4m. 1. Z i = Z A = 0. Y i = Y A L q + F
Microsoft Word - TPLJ-januar 2017.doc
 Београд, 21. јануар 2017. 1. За дату кружну плочу која је еластично укљештена у кружни прстен и оптерећења према слици одредити максимални напон у кружном прстену. М = 150 knm/m p = 30 kn/m 2 2. За зидни
Београд, 21. јануар 2017. 1. За дату кружну плочу која је еластично укљештена у кружни прстен и оптерећења према слици одредити максимални напон у кружном прстену. М = 150 knm/m p = 30 kn/m 2 2. За зидни
EНЕРГЕТСКИ ПРЕТВАРАЧИ 1 јануар Трофазни једнострани исправљач прикључен је на круту мрежу 3x380V, 50Hz преко трансформатора у спрези Dy, као
 EНЕРГЕТСКИ ПРЕТВАРАЧИ 1 јануар 017. 1. Трофазни једнострани исправљач прикључен је на круту мрежу x80, 50Hz преко трансформатора у спрези Dy, као на слици 1. У циљу компензације реактивне снаге, паралелно
EНЕРГЕТСКИ ПРЕТВАРАЧИ 1 јануар 017. 1. Трофазни једнострани исправљач прикључен је на круту мрежу x80, 50Hz преко трансформатора у спрези Dy, као на слици 1. У циљу компензације реактивне снаге, паралелно
4.1 The Concepts of Force and Mass
 Interferencija i valna priroda svjetlosti FIZIKA PSS-GRAD 23. siječnja 2019. 27.1 Načelo linearne superpozicije Kad dva svjetlosna vala, ili više njih, prolaze kroz istu točku, njihova se električna polja
Interferencija i valna priroda svjetlosti FIZIKA PSS-GRAD 23. siječnja 2019. 27.1 Načelo linearne superpozicije Kad dva svjetlosna vala, ili više njih, prolaze kroz istu točku, njihova se električna polja
PowerPoint Presentation
 Nedjelja 6 - Lekcija Projiciranje Postupci projiciranja Projiciranje je postupak prikazivanja oblika nekog, u opštem slučaju trodimenzionalnog, predmeta dvodimenzionalnim crtežom. Postupci projiciranja
Nedjelja 6 - Lekcija Projiciranje Postupci projiciranja Projiciranje je postupak prikazivanja oblika nekog, u opštem slučaju trodimenzionalnog, predmeta dvodimenzionalnim crtežom. Postupci projiciranja
15.JANUAR PLUS TEST 1 STRANA 2 1 Vozač je: 1 svako lice koje se u saobraćaju na putu nalazi u vozilu; 2 lice koje na putu upravlja vozilom. 2 Kako se
 15.JANUAR PLUS TEST 1 STRANA 2 1 Vozač je: 1 svako lice koje se u saobraćaju na putu nalazi u vozilu; 2 lice koje na putu upravlja vozilom. 2 Kako se naziva uzdužni dio kolovoza namijenjen za saobraćaj
15.JANUAR PLUS TEST 1 STRANA 2 1 Vozač je: 1 svako lice koje se u saobraćaju na putu nalazi u vozilu; 2 lice koje na putu upravlja vozilom. 2 Kako se naziva uzdužni dio kolovoza namijenjen za saobraćaj
М И Л Е Н А К У Л И Ћ Ј ЕД НО Ч И Н К А ЗА П Е ТО РО ПУТ ИЗ БИ ЛЕ ЋЕ Сред пу ша ка, ба јо не та, стра же око нас, Ти хо кре ће на ша че та, кроз би ле
 М И Л Е Н А К У Л И Ћ Ј ЕД НО Ч И Н К А ЗА П Е ТО РО ПУТ ИЗ БИ ЛЕ ЋЕ Сред пу ша ка, ба јо не та, стра же око нас, Ти хо кре ће на ша че та, кроз би лећ ки крас. Би ле ћан ка, 1940. Да ли те бе ико ве се
М И Л Е Н А К У Л И Ћ Ј ЕД НО Ч И Н К А ЗА П Е ТО РО ПУТ ИЗ БИ ЛЕ ЋЕ Сред пу ша ка, ба јо не та, стра же око нас, Ти хо кре ће на ша че та, кроз би лећ ки крас. Би ле ћан ка, 1940. Да ли те бе ико ве се
ma??? - Primer 1 Spregnuta ploca
 Primer 1 - proračun spregnute ploče na profilisanom limu 1. Karakteristike spregnute ploče Spregnuta ploča je raspona 4 m. Predviđen je jedan privremeni oslonac u polovini raspona ploče u toku građenja.
Primer 1 - proračun spregnute ploče na profilisanom limu 1. Karakteristike spregnute ploče Spregnuta ploča je raspona 4 m. Predviđen je jedan privremeni oslonac u polovini raspona ploče u toku građenja.
Microsoft Word - 7. cas za studente.doc
 VII Диферeнцни поступак Користи се за решавање диференцијалних једначина. Интервал на коме је дефинисана тражена функција се издели на делова. Усвоји се да се непозната функција између сваке три тачке
VII Диферeнцни поступак Користи се за решавање диференцијалних једначина. Интервал на коме је дефинисана тражена функција се издели на делова. Усвоји се да се непозната функција између сваке три тачке
Microsoft PowerPoint - fizika 9-oscilacije
 Предиспитне обавезе Шема прикупљања поена - измене Активност у току предавања = 5 поена (са више од 3 одсуствовања са предавања се не могу добити) Лабораторијске вежбе = 10 поена обавезни сви поени односно
Предиспитне обавезе Шема прикупљања поена - измене Активност у току предавања = 5 поена (са више од 3 одсуствовања са предавања се не могу добити) Лабораторијске вежбе = 10 поена обавезни сви поени односно
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА школска 2017/2018. година ТЕС
 Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА школска 017/018. година ТЕСТ ФИЗИКА ПРИЈЕМНИ ИСПИТ ЗА УПИС УЧЕНИКА СА ПОСЕБНИМ СПОСОБНОСТИМА
Република Србија МИНИСТАРСТВО ПРОСВЕТЕ, НАУКЕ И ТЕХНОЛОШКОГ РАЗВОЈА ЗАВОД ЗА ВРЕДНОВАЊЕ КВАЛИТЕТА ОБРАЗОВАЊА И ВАСПИТАЊА школска 017/018. година ТЕСТ ФИЗИКА ПРИЈЕМНИ ИСПИТ ЗА УПИС УЧЕНИКА СА ПОСЕБНИМ СПОСОБНОСТИМА
Microsoft Word - Domacii zadatak Vektori i analiticka geometrija OK.doc
 задатак. Вектор написати као линеарну комбинацију вектора.. }. } } }. }. } } }. }. } } }. }. } } 9}. }. } } }. }. } } }. }. } } } 9 8. }. } } } 9. }. } } }. }. } } }. }. } } }. }. } } }. }. } } }. }. }
задатак. Вектор написати као линеарну комбинацију вектора.. }. } } }. }. } } }. }. } } }. }. } } 9}. }. } } }. }. } } }. }. } } } 9 8. }. } } } 9. }. } } }. }. } } }. }. } } }. }. } } }. }. } } }. }. }
Numeričke metode u fizici 1, Projektni zadataci 2018./ Za sustav običnih diferencijalnih jednadžbi, koje opisuju kretanje populacije dviju vrs
 Numeričke metode u fizici, Projektni zadataci 8./9.. Za sustav običnih diferencijalnih jednadžbi, koje opisuju kretanje populacije dviju vrsta životinja koje se nadmeću za istu hranu, dx ( dt = x x ) xy
Numeričke metode u fizici, Projektni zadataci 8./9.. Za sustav običnih diferencijalnih jednadžbi, koje opisuju kretanje populacije dviju vrsta životinja koje se nadmeću za istu hranu, dx ( dt = x x ) xy
Zadaci s pismenih ispita iz matematike 2 s rješenjima MATEMATIKA II x 4y xy 2 x y 1. Odredite i skicirajte prirodnu domenu funkcije cos ln
 Zadaci s pismenih ispita iz matematike s rješenjima 0004 4 Odredite i skicirajte prirodnu domenu funkcije cos ln f, Arc Izračunajte volumen tijela omeđenog plohama z e, 9 i z 0 Izračunajte ln e d,, ln
Zadaci s pismenih ispita iz matematike s rješenjima 0004 4 Odredite i skicirajte prirodnu domenu funkcije cos ln f, Arc Izračunajte volumen tijela omeđenog plohama z e, 9 i z 0 Izračunajte ln e d,, ln
Microsoft Word - lv2_m_cirilica.doc
 lv2_m ИСПИТИВАЊЕ ТАЧНОСТИ СТРУГОВА Ово је друга лабораторијска вежба (PL-2+PL-4) и има ова два дела: PL-2 Упутство за извођење друге лабораторијске вежбе и PL-4 Друга лабораторијска вежба Испитивање тачности
lv2_m ИСПИТИВАЊЕ ТАЧНОСТИ СТРУГОВА Ово је друга лабораторијска вежба (PL-2+PL-4) и има ова два дела: PL-2 Упутство за извођење друге лабораторијске вежбе и PL-4 Друга лабораторијска вежба Испитивање тачности
Microsoft Word - GI_novo - materijali za ispit
 GEOTEHNIČKO INŽENJERSTVO DIJAGRAMI, TABLICE I FORMULE ZA ISPIT ak.god. 2011/2012 2 1 υi s yi = pb I syi Ei Slika 1. Proračun slijeganja vrha temelja po metodi prema Mayne & Poulos. Slika 2. Proračun nosivosti
GEOTEHNIČKO INŽENJERSTVO DIJAGRAMI, TABLICE I FORMULE ZA ISPIT ak.god. 2011/2012 2 1 υi s yi = pb I syi Ei Slika 1. Proračun slijeganja vrha temelja po metodi prema Mayne & Poulos. Slika 2. Proračun nosivosti
ФАКУЛТЕТ ОРГАНИЗАЦИОНИХ НАУКА
 Питања за усмени део испита из Математике 3 I. ДИФЕРЕНЦИЈАЛНЕ ЈЕДНАЧИНЕ 1. Појам диференцијалне једначине. Пикарова теорема. - Написати општи и нормални облик диференцијалне једначине првог реда. - Дефинисати:
Питања за усмени део испита из Математике 3 I. ДИФЕРЕНЦИЈАЛНЕ ЈЕДНАЧИНЕ 1. Појам диференцијалне једначине. Пикарова теорема. - Написати општи и нормални облик диференцијалне једначине првог реда. - Дефинисати:
Kvadrupolni maseni analizator, princip i primena u kvali/kvanti hromatografiji
 Kvadrupolni maseni analizator, princip i primena u kvali/kvanti hromatografiji doc dr Nenad Vuković, Institut za hemiju, Prirodno-matematički fakultet u Kragujevcu JONIZACIJA ELEKTRONSKIM UDAROM Joni u
Kvadrupolni maseni analizator, princip i primena u kvali/kvanti hromatografiji doc dr Nenad Vuković, Institut za hemiju, Prirodno-matematički fakultet u Kragujevcu JONIZACIJA ELEKTRONSKIM UDAROM Joni u
Sveučilište J.J. Strossmayera Fizika 2 FERIT Predložak za laboratorijske vježbe Cilj vježbe Određivanje specifičnog naboja elektrona Odrediti specifič
 Cilj vježbe Određivanje specifičnog naboja elektrona Odrediti specifični naboja elektrona (omjer e/me) iz poznatog polumjera putanje elektronske zrake u elektronskoj cijevi, i poznatog napona i jakosti
Cilj vježbe Određivanje specifičnog naboja elektrona Odrediti specifični naboja elektrona (omjer e/me) iz poznatog polumjera putanje elektronske zrake u elektronskoj cijevi, i poznatog napona i jakosti
ZOBS
 Vozač je: svako lice koje se u saobraćaju na putu nalazi u vozilu; lice koje na putu upravlja vozilom. Da li se na vozila smiju postavljati gume sa ekserima? da; ne. 3 Kako se naziva uzdužni dio kolovoza
Vozač je: svako lice koje se u saobraćaju na putu nalazi u vozilu; lice koje na putu upravlja vozilom. Da li se na vozila smiju postavljati gume sa ekserima? da; ne. 3 Kako se naziva uzdužni dio kolovoza
Univerzitet u Ni²u Prirodno - matemati ki fakultet Departman za matematiku KLASTER ANALIZA U STATISTIƒKOM ZAKLjUƒIVANjU Master rad Student: Katarina M
 Univerzitet u Ni²u Prirodno - matemati ki fakultet Departman za matematiku KLASTER ANALIZA U STATISTIƒKOM ZAKLjUƒIVANjU Master rad Student: Katarina M. Krsti Mentor: Prof. dr Aleksandar S. Nasti br. indeksa
Univerzitet u Ni²u Prirodno - matemati ki fakultet Departman za matematiku KLASTER ANALIZA U STATISTIƒKOM ZAKLjUƒIVANjU Master rad Student: Katarina M. Krsti Mentor: Prof. dr Aleksandar S. Nasti br. indeksa
Osnovni pojmovi teorije verovatnoce
 Osnovni pojmovi teorije verovatnoće Profesor Milan Merkle emerkle@etf.rs milanmerkle.etf.rs Verovatnoća i Statistika-proleće 2019 Milan Merkle Osnovni pojmovi ETF Beograd 1 / 13 Verovatnoća i statistika:
Osnovni pojmovi teorije verovatnoće Profesor Milan Merkle emerkle@etf.rs milanmerkle.etf.rs Verovatnoća i Statistika-proleće 2019 Milan Merkle Osnovni pojmovi ETF Beograd 1 / 13 Verovatnoća i statistika:
Slide 1
 Фрактална геометрија и фрактали у aрхитектури 3D L-системи - увод S =F F=FF+F-[F+F-F]-F+F angle = 90 n = 2 Фрактална геометрија и фрактали у aрхитектури 3D L-системи - увод S =F F=FF+F-[F+F-F]-F+F angle
Фрактална геометрија и фрактали у aрхитектури 3D L-системи - увод S =F F=FF+F-[F+F-F]-F+F angle = 90 n = 2 Фрактална геометрија и фрактали у aрхитектури 3D L-системи - увод S =F F=FF+F-[F+F-F]-F+F angle
Sluzbeni glasnik Grada Poreca br
 18. Na temelju lanka 34. stavak 1. to ka 1. Zakona o komunalnom gospodarstvu ("Narodne novine" broj 36/95, 70/97, 128/99, 57/00, 129/00, 59/01, 26/03, 82/04, 110/04 i 178/04) te lanka 40. Statuta Grada
18. Na temelju lanka 34. stavak 1. to ka 1. Zakona o komunalnom gospodarstvu ("Narodne novine" broj 36/95, 70/97, 128/99, 57/00, 129/00, 59/01, 26/03, 82/04, 110/04 i 178/04) te lanka 40. Statuta Grada
Матрична анализа конструкција
 . 5 ПРИМЕР На слици. је приказан носач који је састављен од три штапа. Хоризонтални штапови су константног попречног пресека b/h=./.5 m, док је коси штап са линеарном променом висине. Одредити силе на
. 5 ПРИМЕР На слици. је приказан носач који је састављен од три штапа. Хоризонтални штапови су константног попречног пресека b/h=./.5 m, док је коси штап са линеарном променом висине. Одредити силе на
Зборник радова 6. Међународне конференције о настави физике у средњим школама, Алексинац, март Нелинеарно еластично клатно Милан С. Коваче
 Нелинеарно еластично клатно Милан С. Ковачевић 1, Мирослав Јовановић 2 1 Природно-математички факултет, Крагујевац, Србија 2 Гимназија Јосиф Панчић Бајина Башта, Србија Апстракт. У овом раду је описан
Нелинеарно еластично клатно Милан С. Ковачевић 1, Мирослав Јовановић 2 1 Природно-математички факултет, Крагујевац, Србија 2 Гимназија Јосиф Панчић Бајина Башта, Србија Апстракт. У овом раду је описан
Geometrija molekula
 Geometrija molekula Oblik molekula predstavlja trodimenzionalni raspored atoma u okviru molekula. Geometrija molekula je veoma važan faktor koji određuje fizička i hemijska svojstva nekog jedinjenja, kao
Geometrija molekula Oblik molekula predstavlja trodimenzionalni raspored atoma u okviru molekula. Geometrija molekula je veoma važan faktor koji određuje fizička i hemijska svojstva nekog jedinjenja, kao
PITANJA I ZADACI ZA II KOLOKVIJUM IZ MATEMATIKE I Pitanja o nizovima Nizovi Realni niz i njegov podniz. Tačka nagomilavanja niza i granična vrednost(l
 PITANJA I ZADACI ZA II KOLOKVIJUM IZ MATEMATIKE I Pitanja o nizovima Nizovi Realni niz i njegov podniz. Tačka nagomilavanja niza i granična vrednost(limes) niza. Svojstva konvergentnih nizova, posebno
PITANJA I ZADACI ZA II KOLOKVIJUM IZ MATEMATIKE I Pitanja o nizovima Nizovi Realni niz i njegov podniz. Tačka nagomilavanja niza i granična vrednost(limes) niza. Svojstva konvergentnih nizova, posebno
ТРОУГАО БРЗИНА и математичка неисправност Лоренцове трансформације у специјалној теорији релативности Александар Вукеља www.
 ТРОУГАО БРЗИНА и математичка неисправност Лоренцове трансформације у специјалној теорији релативности Александар Вукеља aleksandar@masstheory.org www.masstheory.org Август 2007 О ауторским правима: Дело
ТРОУГАО БРЗИНА и математичка неисправност Лоренцове трансформације у специјалној теорији релативности Александар Вукеља aleksandar@masstheory.org www.masstheory.org Август 2007 О ауторским правима: Дело
Rešetkasti nosači
 Elementi opterećeni savijanjem - nosači Metalne konstrukcije 1 P6-1 Slučajevi naprezanja Savijanje dominantan vid naprezanja! Savijanje može biti posledica sledećih naprezanja: čisto pravo savijanje (M
Elementi opterećeni savijanjem - nosači Metalne konstrukcije 1 P6-1 Slučajevi naprezanja Savijanje dominantan vid naprezanja! Savijanje može biti posledica sledećih naprezanja: čisto pravo savijanje (M