Microsoft PowerPoint - MR_3_Navigacija_nepoznate_prepreke_s.ppt [Compatibility Mode]
|
|
|
- Един Пешић
- пре 6 година
- Прикази:
Транскрипт

1 JU Univerzitet u Tuzli Fakultet elektrotehnike Postdiplomski studij, Modul: Automatika i Robotika Predmet: Robotika, Mehatronika i Automatizacija, ti ij Navigacija prema cilju Vanr.prof.dr. Lejla Banjanović-Mehmedović
2 Zadaci mobilnih robota Da bi uspješno izvršio zadatak navigacije robot mora biti sposoban u svakom trenutku izvesti četiri fundamentalne navigacijske radnje: Gradnja mape robotske okoline Lokalizacija robota Planiranje putanje Upravljanje kretanjem
3 Navigacija Problem navigacije mobilnog robota može se podijeliti u dva potproblema: kretanje prema cilju i izbjegavanje prepreka. Problem izbjegavanja prepreka može se riješiti korištenjem lokalnih informacija. U slučaju neprediktabilnog okruženja ovaj problem se ne može unaprijed riješiti budući da robot treba osjetiti prepreke prije njihovog obilaženja. Problem kretanja prema cilju je globalni problem i ne može se riješiti samo na osnovu lokalnih informacija.
4 Navigacija U robotici, navigacija je čin kretanja robota sa jednog mjesta na drugo uz izbjegavanje prepreka. Pri navigaciji, roboti ili: Idu prema cilju/evima ili slijede fiksnu putanju (poznatu unaprijed) Kada se kreće prema cilju, robot se obično oslanja na senzorska očitanja i koriguje lokaciju i smjer prema najboljem izboru, koji vodi ka cilju.
5 Planiranje kretanja Postoje dvije fundamentalne paradigme za planiranje putanje s izbjegavanjem prepreka: Lokalni pristup se obavlja on-line korištenjem malog broja poznatih informacija o prostoru. Moguće je reagirati na nepredviđene promjene i ne zahtijeva se velik iznos računarskog vremena. Na ovaj način nije moguće dobiti optimalnu putanju. Globalni pristup koji generiše putanju off-line korištenjem poznatih informacija o okolini. On zahtijeva precizno specificiran model okoline i znatan iznos vremena računanja. Ovim pristupom nije moguće reagirati na nepredviđene promjene u okolini.
6 Planiranje kretanja Jedan od ključnih problema u mobilnoj robotici je sposobnost generisanja plana vlastitog kretanja s ciljem izvršavanja nekog zadatka. Proces kojim se određuje skup slobodnih putanja kretanja (engl. collision free paths) robota do željenog cilja naziva se planiranje kretanja.
7 Planiranje putanje Kada je obezbjeđena fiksna putanja prema kojoj se navigira, putanja je obično proračunata (planirana) ranije. Planiranje putanje je metodologija ispitivanja poznatih informacija o okruženju i proračun putanje koja zadovoljava jedan ili više uslova: Izbjeći prepreke, p najkraća, najmanje j okretaja, sigurna, Ključ za plan laniranje putanje je efikasnost kod realnih robota, optimalno rješenje nije uvijek praktično apro proksimativna rješenja su često dovoljna i poželjna.
8 Ciljevi Tehnike navigacije robota prema cilju Algoritmi ik koji rade u okruženju sa poznatim lokacijama prepreka nepoznatim lokacijama prepreka Različite forme mapa Navigacija korištenjem mape bazirane na značajkama Navigacija korištenjem potencijalnih polja
9 Sadržaj Ciljno usmjerena Navigacija Navigacija i planiranje putanje Navigacija prema cilju Navigacija u nepoznatom okruženju Bug Algoritmi (Bug1, Bug2, Tangent Bug) Vector Field Histograms Navigacija u poznatom okruženju Navigacija bazirana na mapama značajki Navigacija bazirana na potencijalnim poljima
10 Navigacija ij u nepoznatom okruženju
11 Strategije Strategije navigacije prema cilju kada su lokacije prepreka nepoznate: Robot mora osjetiti prepreke Robot koristi reaktivnu navigaciju (ide prema cilju i koriguje putanju) Strategije: Bug 1 algoritam Bug 2 algoritam Tangent Bug algoritam Vector Field Histograms (VFH)
12 Bug Algoritmi
13 Bug Algoritmi Ciljna lokacija je poznata ali su prepreke nepoznate GPS je raspoloživ => robot zna svoju lokaciju unutar okruženja ili robot ima efikasne metode dead reckoning. Robot ima senzore da detektuje i slijedi granice prepreka Jednostavni algoritmi i za ovaj scenario: Bug1 Bug2 Tangent Bug
14 Bug1 Algoritam Bug1 Strategija ija: Kretanje prema cilju dok ne naiđe na prepreku, obići prepreku i naći najbližu tačku cilju. Kretanje nazad prema najbližoj tački te kretanje prema cilju. Podrazumjeva se da robot zna ciljnu tačku ali je ne može vidjeti ili detektovati. Robot pronalazi granične tačke najbliže cilju Cilj (g x, g y ) Start (r x, r y ) Robot okrenut prema cilju Robot obilazi cijelu prepreku
15 Bug1 Algoritam Uvijek pronalazi ciljnu tačku (ako je dosegljiva). Izvršava iscrpnu pretragu najbolje j tačke u kojoj j napušta g prepreku i ide prema cilju. p 3 m 3 m 2 r p 1 p 2 m 1 g p m r
16 Bug2 Algoritam Varijacija algoritma a koji će omogućiti robotu da izbjegne kretanje duž SVIH putanja oko prepreke. Bug2 Strategija ija: Kretanje prema cilju dok ne naiđe na prepreku, onda ide oko prepreke. Robot se sjeća linije na kojoj je naišao na prepreku prema cilju, prestaje sa slijeđenjem, kada ponovo naiđe na liniju. Robot slijedi samo dio prepreke Cilj (g x, g y ) Start (r x, r y ) Robot pronalazi graničnu tačku koja presjeca liniju prema cilju i napušta je ovdje, krećući se prema cilju.
17 Bug2 Algoritam Uvijek pronalazi ciljnu tačku (ako je dosegljiva). Izvršava pohlepnu p pretragu najbolje j tačke u kojoj j napušta prepreku i ide prema cilju. p 3 m 2 m 3 g p 2 m 1 r p 1
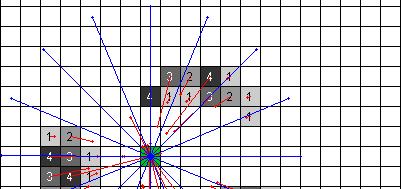
18 Bug2 Algoritam Bug2 algoritam je brži, kad su prepreke jednostavnije ali je sporiji od Bug1 u kompleksnom okruženju. Ova dva algoritma podrazumjevaju da robot samo detektuje prisustvo prepreka kontaktom ili pri bliskom susretu. Možemo unaprijediti algoritam kada je robot opremljen sa 360 range senzor orom, om, koji određuje distance do prepreka.
 Operativno područje senzora je ograničeno Neke prepreke su iza opsega senzora.")
19 Tangent Bug Algoritam Podrazumjeva se da robot ima senzor kojima detektuje distance prema preprekama oko njega: Praktično: Broj detektalivnih uglova je fiksan (npr. svakih 5) Operativno područje senzora je ograničeno Neke prepreke su iza opsega senzora. Iako su prepreke u opsegu, sensor ne može detektovati neke uglove.
: prepreke izvan opsega prepreke nejasne Interval kontinuiteta je definisan sa dvije tačke diskontinuiteta.")
20 Tangent Bug Algoritam Definisanje isanje tački diskontinuiteta kao tački u kojima je senzorsko očitanje izgubljeno (zbog radijalnog dometa): prepreke izvan opsega prepreke nejasne Interval kontinuiteta je definisan sa dvije tačke diskontinuiteta. Interval kontinuiteta
21 Tangent Bug Algoritam Algoritam sličan Bug2 algoritmu: robot se kreće ć prema cilju dok ne osjeti obje bjekt tdi direktno između sebe i cilja. - U tom slučaju, linija ija od robota do cilja presjeca interval kontinuiteta. Robot se pomjera do diskontinuit ontinuiteta (e 1 or e 2 ) intervala tako da maks ksimalno umanjuje heurističku estimaciju do cilja. g - e.g., MIN( re 1 + e 1 g, re 2 + e 2 g ) e 1 r e 2
22 Tangent Bug Algoritam Robot se nastavlja kretati prema tački diskontinuiteta sve dok više ne može umanjivati heurističku estimaciju prema cilju. tj. dosegao je lokal alni minimum. Robot potom slijedi granicu, idući prema tački diskontinuit ontinuiteta u istom mjeru. Napušta granicu idući prema cilju ponovo.
23 Tangent Bug Algorithm Bug algoritmi planiranja imaju sljedeće prednosti: Jednostavni i intuitivni Lagana implementacija Garantovano (teoretsko) dosezanje cilja (kad je moguće) Imaju praktične probleme: Predpostavljau perfekto pozicioniranje (nije stvarno moguće) Predpostavljaju senzaciju bez greške (nije uvijek moguće) Stvarni roboti imaju ograničenu ugaonu rezoluciju p 1 p 2 g r
24 Vector Field Histogrami
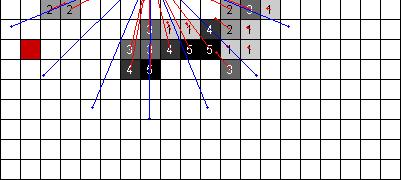
25 Vector Field Histogrami Vector Field Histogrami se koriste za brzu navigaciju oko prepreka. Kao i tehnika potencijalnih polja, ova tehnika upravlja u najboljem pravcu koji vodi do cilja. Svaka lokacija u mrežnoj mapi predstavlja vektor, baziran na tekućem ć senzorskom očitanju. Vektori se kombinuju kao potencijalna polja da bi proizveli ukupan vektor smjera koji se koristi da usmjeri robota.
26 Vector Field Histogrami 2D mreža reducirana na histogram iz kojeg su ugao usmjeravnja j i brzina robota proračunati č. Veći broj: veća izvjesnost prepreke Ciljna lokacija Tekuća lokacija i smjer
27 Vector Field Histograms U cilju pojednostavljenja proračuna, koristi se samo dio (prozor) umjesto cjele mreže tzv. aktivna mreža. Mjenja se sa kretanjem robot bota. Histogram proračunat samo za ćelije u prozoru. Robot ispituje samo lokalne informacije, ne globalne kao kod metode potencijalnih polja Aktivna mreža

28 Vector Field Histogrami Za svaku ćeliju je proračunat vektor: Direktno iz ćelije trenutne robotske lokacije Magnitude koja korespondira izvjesnosti prepreke (tj. trenutne vrijednosti ćelije
29 Proračun vektora (c ij x, c ij y) lokacija ćelije na poziciji (i, j) u mreži sa izvjesnosti c ij val.. (r x, r y ) robotska tekuća lokacija Proračun vektor tora v ij za ćeliju c ij : Konstanta normalizacije (npr., 12) Konstanta korištena za normalizaciju. (npr., 1.5) Distanca od centra ćelije do centra robota v ij = ij mag (c val val) 2 ij x, ij ) (Ф σ dist((c x c y), y (r x, r y ))) v ij dir = atan((c ij y - r y ) / (c ij x - r x )) )) Dodaje 180 kada je c ij x -r x >= 0 x x
.")

 Multiple vectors are grouped within this")
30 Proračun sektora Given an angular resolution α,, the vectors are grouped into a specified number of angular regions (i.e., sectors). e.g., if α = 24, then each sector represents angles within a 15 wedge. If α = 16 then wedges are 22.5 etc Sector s ij of cell c ij computed as: s ij = (int) v ij dir / (360 / α) Multiple vectors are grouped within this 22.5 sector.
31 Proračun histograma Proračun histograma sa α bin-ova (tj. jedan bin za svaki sektor). Proračun h k za sektor (0 k < α), nazvan polarna gustina prepreka, kao sume magnituda svih vektora sa istim s ij ij. h k = (v ij mag s ij = k) i, j Svi vektor tori ćelija v ij adekvatne sektore. su distribuirani irani u ij su




32 Proračun histograma Generisanje histograma: α = Dolina indicira otvaranje Pikovi indiciraju prepreke Magnitude Radial Degrees α = Rezolucija sektora bolja: Razlika u otvaranju između dvije prepreke tude Magnit Radial Degrees
33 Proračun histograma Usrednjavanje histograma Magnitude Magnitude Radial Degrees Radial Degrees Bez usrednjavanja Usrednjavanje 4 susjeda (jednom) Magnitud de Magnitud de prag Radial Degrees Radial Degrees Usrednjavanje 4 susjeda (dvaput) Usrednjavanje 4 susjeda ( četiri puta)

) / (360 / α)) 70 Naći dolinu 60 s i, s i+1,, s k 50 koja je")

34 Korištenje histograma Kada je histogram kreiran, određivanje Sektor tora koji sadrži vektor od robotske lokacije do ciljne lokacije: s g = (int) (atan(( atan((g y - r y )/( (g x - r x )) / (360 / α)) 70 Naći dolinu 60 s i, s i+1,, s k 50 koja je 40 najbliža sektoru s g Primjeniti prag! Magnitude Radial Degrees
35 Korištenje histograma Sektori s i, s i+1,, s i+k dolina moraju imaju magnitude < praga ε. s c je ili sektor s i ili s i+k, koji je najbliži sektor toru s g. Klasifikacija dolina kao: široka: : if k > prag max s f = sektor s c max (koji leži u dolini) s c+max max = 2 S i+4 S i+3 S i+2 S i+1 S i s c uska: : if k max s f = ili s i ili s i+k koji nije s c
36 Korištenje histograma Robot se kreće u smjeru θ = (s f + s c ) / 2 S f S c
37 Problematika Ako je prag ε postavljen visoko robot može doći previše blizu preprekama može se kretati suviše brzo da bi prevenirao sudar Ako je prag ε postavljen nisko robot može izbjeći samo neke moguće doline Generalno no, prag je samo bitan kada se robot kreće brzo pored usko postavljenih prepreka.
Development Case
 Tehnička dokumentacija Verzija Studentski tim: Nastavnik: < izv. prof. dr. sc. Nikola Mišković> FER 2 -
Tehnička dokumentacija Verzija Studentski tim: Nastavnik: < izv. prof. dr. sc. Nikola Mišković> FER 2 -
SRV_3_Ugradj_racun_sistemi_p [Compatibility Mode]
![SRV_3_Ugradj_racun_sistemi_p [Compatibility Mode]](/thumbs/102/154712973.jpg "SRV_3_Ugradj_racun_sistemi_p [Compatibility Mode]") Ugrađeni računarski sistemi vremenu pr. 3 Vanr.prof.dr. Lejla Banjanović- Izazov se zove ugrađeni sistemi... Revolucija u domenu ugrađenih (embedded) sistema Embedded digitalna tehnologija je inkorporirana
Ugrađeni računarski sistemi vremenu pr. 3 Vanr.prof.dr. Lejla Banjanović- Izazov se zove ugrađeni sistemi... Revolucija u domenu ugrađenih (embedded) sistema Embedded digitalna tehnologija je inkorporirana
Postojanost boja
 Korištenje distribucije osvjetljenja za ostvaranje brzih i točnih metode za postojanost boja Nikola Banić 26. rujna 2014. Sadržaj Postojanost boja Ubrzavanje lokalnog podešavanja boja Distribucija najčešćih
Korištenje distribucije osvjetljenja za ostvaranje brzih i točnih metode za postojanost boja Nikola Banić 26. rujna 2014. Sadržaj Postojanost boja Ubrzavanje lokalnog podešavanja boja Distribucija najčešćih
SRV_1_Problematika_real_time_sistema
 SISTEMI REALNOG VREMENA Vanr.prof. Dr. Lejla Banjanović-Mehmedović www.lejla-bm.com.ba Mehmedović 1 Sadržaj predmeta 1. Problematika real-time sistema. Klasifikacije sistema u realnom vremenu. 2. Aplikacije
SISTEMI REALNOG VREMENA Vanr.prof. Dr. Lejla Banjanović-Mehmedović www.lejla-bm.com.ba Mehmedović 1 Sadržaj predmeta 1. Problematika real-time sistema. Klasifikacije sistema u realnom vremenu. 2. Aplikacije
Електротехнички факултет Универзитета у Београду Катедра за рачунарску технику и информатику Kолоквијум из Интелигентних система Колоквију
 Електротехнички факултет Универзитета у Београду 19.11.017. Катедра за рачунарску технику и информатику Kолоквијум из Интелигентних система Колоквијум траје h. Напуштање сале дозвољено је након 1h. Употреба
Електротехнички факултет Универзитета у Београду 19.11.017. Катедра за рачунарску технику и информатику Kолоквијум из Интелигентних система Колоквијум траје h. Напуштање сале дозвољено је након 1h. Употреба
Microsoft Word - predavanje8
 DERIVACIJA KOMPOZICIJE FUNKCIJA Ponekad je potrebno derivirati funkcije koje nisu jednostavne (složene su). Na primjer, funkcija sin2 je kompozicija funkcija sin (vanjska funkcija) i 2 (unutarnja funkcija).
DERIVACIJA KOMPOZICIJE FUNKCIJA Ponekad je potrebno derivirati funkcije koje nisu jednostavne (složene su). Na primjer, funkcija sin2 je kompozicija funkcija sin (vanjska funkcija) i 2 (unutarnja funkcija).
I година Назив предмета I термин Вријеме II термин Вријеме Сала Математика : :00 све Основи електротехнике
 I година Математика 1 2225 07.02.2019. 9:00 21.02.2019. 9:00 све Основи електротехнике 1 2226 04.02.2019. 9:00 18.02.2019. 9:00 све Програмирање 1 2227 08.02.2019. 9:00 22.02.2019. 9:00 све Основи рачунарске
I година Математика 1 2225 07.02.2019. 9:00 21.02.2019. 9:00 све Основи електротехнике 1 2226 04.02.2019. 9:00 18.02.2019. 9:00 све Програмирање 1 2227 08.02.2019. 9:00 22.02.2019. 9:00 све Основи рачунарске
I година Назив предмета I термин Вријеме II термин Вријеме Сала Математика : :00 све Основи електротехнике
 I година Математика 1 2225 20.06.2019. 9:00 04.07.2019. 9:00 све Основи електротехнике 1 2226 17.06.2019. 9:00 01.07.2019. 13:00 све Програмирање 1 2227 21.06.2019. 9:00 05.07.2019. 9:00 све Основи рачунарске
I година Математика 1 2225 20.06.2019. 9:00 04.07.2019. 9:00 све Основи електротехнике 1 2226 17.06.2019. 9:00 01.07.2019. 13:00 све Програмирање 1 2227 21.06.2019. 9:00 05.07.2019. 9:00 све Основи рачунарске
I година Назив предмета I термин Вријеме II термин Вријеме Сала Математика : :00 све Основи електротехнике
 I година Математика 1 2225 05.09.2019. 9:00 19.09.2019. 9:00 све Основи електротехнике 1 2226 02.09.2019. 9:00 16.09.2019. 9:00 све Програмирање 1 2227 06.09.2019. 9:00 20.09.2019. 9:00 све Основи рачунарске
I година Математика 1 2225 05.09.2019. 9:00 19.09.2019. 9:00 све Основи електротехнике 1 2226 02.09.2019. 9:00 16.09.2019. 9:00 све Програмирање 1 2227 06.09.2019. 9:00 20.09.2019. 9:00 све Основи рачунарске
I година Назив предмета I термин Вријеме Сала Математика :00 све Основи електротехнике :00 све Програмирање
 I година Математика 1 2225 03.10.2019. 15:00 све Основи електротехнике 1 2226 30.09.2019. 15:00 све Програмирање 1 2227 04.10.2019. 15:00 све Основи рачунарске технике 2228 01.10.2019. 15:00 све Социологија
I година Математика 1 2225 03.10.2019. 15:00 све Основи електротехнике 1 2226 30.09.2019. 15:00 све Програмирање 1 2227 04.10.2019. 15:00 све Основи рачунарске технике 2228 01.10.2019. 15:00 све Социологија
My_ST_FTNIspiti_Free
 ИСПИТНИ ЗАДАЦИ СУ ГРУПИСАНИ ПО ТЕМАМА: ЛИМЕСИ ИЗВОДИ ФУНКЦИЈЕ ЈЕДНЕ ПРОМЕНЉИВЕ ИСПИТИВАЊЕ ТОКА ФУНКЦИЈЕ ЕКСТРЕМИ ФУНКЦИЈЕ СА ВИШЕ ПРОМЕНЉИВИХ 5 ИНТЕГРАЛИ ДОДАТАК ФТН Испити С т р а н а Лимеси Одредити
ИСПИТНИ ЗАДАЦИ СУ ГРУПИСАНИ ПО ТЕМАМА: ЛИМЕСИ ИЗВОДИ ФУНКЦИЈЕ ЈЕДНЕ ПРОМЕНЉИВЕ ИСПИТИВАЊЕ ТОКА ФУНКЦИЈЕ ЕКСТРЕМИ ФУНКЦИЈЕ СА ВИШЕ ПРОМЕНЉИВИХ 5 ИНТЕГРАЛИ ДОДАТАК ФТН Испити С т р а н а Лимеси Одредити
Matematka 1 Zadaci za vežbe Oktobar Uvod 1.1. Izračunati vrednost izraza (bez upotrebe pomoćnih sredstava): ( ) [ a) : b) 3 3
: ( ) [ a) : b) 3 3") Matematka Zadaci za vežbe Oktobar 5 Uvod.. Izračunati vrednost izraza bez upotrebe pomoćnih sredstava): ) [ a) 98.8.6 : b) : 7 5.5 : 8 : ) : :.. Uprostiti izraze: a) b) ) a b a+b + 6b a 9b + y+z c) a +b
Matematka Zadaci za vežbe Oktobar 5 Uvod.. Izračunati vrednost izraza bez upotrebe pomoćnih sredstava): ) [ a) 98.8.6 : b) : 7 5.5 : 8 : ) : :.. Uprostiti izraze: a) b) ) a b a+b + 6b a 9b + y+z c) a +b
2015_k2_z12.dvi
 OBLIKOVANJE I ANALIZA ALGORITAMA 2. kolokvij 27. 1. 2016. Skice rješenja prva dva zadatka 1. (20) Zadano je n poslova. Svaki posao je zadan kao vremenski interval realnih brojeva, P i = [p i,k i ],zai
OBLIKOVANJE I ANALIZA ALGORITAMA 2. kolokvij 27. 1. 2016. Skice rješenja prva dva zadatka 1. (20) Zadano je n poslova. Svaki posao je zadan kao vremenski interval realnih brojeva, P i = [p i,k i ],zai
Школа Ј. Ј. Змај Свилајнац МЕСЕЧНИ ПЛАН РАДА ЗА СЕПТЕМБАР Школска 2018 /2019. Назив предмета: Информатика и рачунарство Разред: 5. Недељни број часова
 Школа Ј. Ј. Змај Свилајнац МЕСЕЧНИ ПЛАН РАДА ЗА СЕПТЕМБАР јединице 1. 1. Увод у информатику и рачунарство 1. 2. Oрганизација података на рачунару 1. 3. Рад са текстуалним документима 1. 4. Форматирање
Школа Ј. Ј. Змај Свилајнац МЕСЕЧНИ ПЛАН РАДА ЗА СЕПТЕМБАР јединице 1. 1. Увод у информатику и рачунарство 1. 2. Oрганизација података на рачунару 1. 3. Рад са текстуалним документима 1. 4. Форматирање
ПА-4 Машинско учење-алгоритми машинског учења
 ПА-4 Машинско учење-алгоритми машинског учења Машинско учење увод и основни појмови Деф: the desgn and development of algorthms that allow computers to mprove ther performance over tme based on data sensor
ПА-4 Машинско учење-алгоритми машинског учења Машинско учење увод и основни појмови Деф: the desgn and development of algorthms that allow computers to mprove ther performance over tme based on data sensor
АНКЕТА О ИЗБОРУ СТУДИЈСКИХ ГРУПА И МОДУЛА СТУДИЈСКИ ПРОГРАМИ МАСТЕР АКАДЕМСКИХ СТУДИЈА (МАС): А) РАЧУНАРСТВО И АУТОМАТИКА (РиА) и Б) СОФТВЕРСКО ИНЖЕЊЕ
: А) РАЧУНАРСТВО И АУТОМАТИКА (РиА) и Б) СОФТВЕРСКО ИНЖЕЊЕ") АНКЕТА О ИЗБОРУ СТУДИЈСКИХ ГРУПА И МОДУЛА СТУДИЈСКИ ПРОГРАМИ МАСТЕР АКАДЕМСКИХ СТУДИЈА (МАС): А) РАЧУНАРСТВО И АУТОМАТИКА (РиА) и Б) СОФТВЕРСКО ИНЖЕЊЕРСТВО И ИНФОРМАЦИОНЕ ТЕХНОЛОГИЈЕ (СИИТ) У циљу бољег
АНКЕТА О ИЗБОРУ СТУДИЈСКИХ ГРУПА И МОДУЛА СТУДИЈСКИ ПРОГРАМИ МАСТЕР АКАДЕМСКИХ СТУДИЈА (МАС): А) РАЧУНАРСТВО И АУТОМАТИКА (РиА) и Б) СОФТВЕРСКО ИНЖЕЊЕРСТВО И ИНФОРМАЦИОНЕ ТЕХНОЛОГИЈЕ (СИИТ) У циљу бољег
Microsoft Word - 15ms261
 Zadatak 6 (Mirko, elektrotehnička škola) Rješenje 6 Odredite sup S, inf S, ma S i min S u skupu R ako je S = { R } a b = a a b + b a b, c < 0 a c b c. ( ), : 5. Skratiti razlomak znači brojnik i nazivnik
Zadatak 6 (Mirko, elektrotehnička škola) Rješenje 6 Odredite sup S, inf S, ma S i min S u skupu R ako je S = { R } a b = a a b + b a b, c < 0 a c b c. ( ), : 5. Skratiti razlomak znači brojnik i nazivnik
Рачунарска интелигенција
 Рачунарска интелигенција Генетско програмирање Александар Картељ kartelj@matf.bg.ac.rs Ови слајдови представљају прилагођење слајдова: A.E. Eiben, J.E. Smith, Introduction to Evolutionary computing: Genetic
Рачунарска интелигенција Генетско програмирање Александар Картељ kartelj@matf.bg.ac.rs Ови слајдови представљају прилагођење слајдова: A.E. Eiben, J.E. Smith, Introduction to Evolutionary computing: Genetic
PowerPoint Presentation
 Колоквијум # задатак подељен на 4 питања: теоријска практична пишу се програми, коначно решење се записује на папиру, кодови се архивирају преко сајта Инжењерски оптимизациони алгоритми /3 Проблем: NLP:
Колоквијум # задатак подељен на 4 питања: теоријска практична пишу се програми, коначно решење се записује на папиру, кодови се архивирају преко сајта Инжењерски оптимизациони алгоритми /3 Проблем: NLP:
Microsoft Word - LelasMarko_routing in ad hoc networks.doc
 ROUTING U AD-HOC MREŽAMA Seminarski rad iz predmeta Sustavi za praćenje i vođenje procesa Zagreb, svibanj 2006. UVOD:... 2 PODJELA PROTOKOLA USMJERAVANJA:... 3 Link State Routing Protocol:... 3 Distance-vector
ROUTING U AD-HOC MREŽAMA Seminarski rad iz predmeta Sustavi za praćenje i vođenje procesa Zagreb, svibanj 2006. UVOD:... 2 PODJELA PROTOKOLA USMJERAVANJA:... 3 Link State Routing Protocol:... 3 Distance-vector
MAZALICA DUŠKA.pdf
 SVEUČILIŠTE JOSIPA JURJA STROSSMAYERA U OSIJEKU ELEKTROTEHNIČKI FAKULTET Sveučilišni studij OPTIMIRANJE INTEGRACIJE MALIH ELEKTRANA U DISTRIBUCIJSKU MREŽU Diplomski rad Duška Mazalica Osijek, 2014. SADRŽAJ
SVEUČILIŠTE JOSIPA JURJA STROSSMAYERA U OSIJEKU ELEKTROTEHNIČKI FAKULTET Sveučilišni studij OPTIMIRANJE INTEGRACIJE MALIH ELEKTRANA U DISTRIBUCIJSKU MREŽU Diplomski rad Duška Mazalica Osijek, 2014. SADRŽAJ
1 Konusni preseci (drugim rečima: kružnica, elipsa, hiperbola i parabola) Definicija 0.1 Algebarska kriva drugog reda u ravni jeste skup tačaka opisan
 Definicija 0.1 Algebarska kriva drugog reda u ravni jeste skup tačaka opisan") 1 Konusni preseci (drugim rečima: kružnica, elipsa, hiperbola i parabola) Definicija 0.1 Algebarska kriva drugog reda u ravni jeste skup tačaka opisan jednačinom oblika: a 11 x 2 + 2a 12 xy + a 22 y 2
1 Konusni preseci (drugim rečima: kružnica, elipsa, hiperbola i parabola) Definicija 0.1 Algebarska kriva drugog reda u ravni jeste skup tačaka opisan jednačinom oblika: a 11 x 2 + 2a 12 xy + a 22 y 2
ИНТЕЛИГЕНТНИ ТЕХНОЛОШКИ СИСТЕМИ АТ-6 Когнитивна роботика: Оцењивање положаја мобилног робота и карактеристичних објеката у технолошком окружењу Оцењив
 ИНТЕЛИГЕНТНИ ТЕХНОЛОШКИ СИСТЕМИ АТ-6 Когнитивна роботика: Оцењивање положаја мобилног робота и карактеристичних објеката у технолошком окружењу Оцењивање положаја робота и карактеристичних објеката у окружењу
ИНТЕЛИГЕНТНИ ТЕХНОЛОШКИ СИСТЕМИ АТ-6 Когнитивна роботика: Оцењивање положаја мобилног робота и карактеристичних објеката у технолошком окружењу Оцењивање положаја робота и карактеристичних објеката у окружењу
Основна школа Дринка Павловић Ул. Косовска 19, Београд Датум: год. Број: /18-7 У складу са чланом 63. став 3, а у вези става 2
 Основна школа Дринка Павловић Ул. Косовска 19, 11000 Београд Датум: 18.02.2019. год. Број: 1.1.5./18-7 У складу са чланом 63. став 3, а у вези става 2. Закона о јавним набавкама ( Сл. гласник РС бр. 124/2012,
Основна школа Дринка Павловић Ул. Косовска 19, 11000 Београд Датум: 18.02.2019. год. Број: 1.1.5./18-7 У складу са чланом 63. став 3, а у вези става 2. Закона о јавним набавкама ( Сл. гласник РС бр. 124/2012,
Univerzitet u Novom Sadu Tehnički fakultet Mihajlo Pupin Zrenjanin Seminarski rad Predmet: Konkuretno programiranje doc. dr Dejan Lacmanovic Zorica Br
 Univerzitet u Novom Sadu Tehnički fakultet Mihajlo Pupin Zrenjanin Seminarski rad Predmet: Konkuretno programiranje doc. dr Dejan Lacmanovic Zorica Brkić SI 29/15 Zrenjanin 2018. Softversko inženjerstvo
Univerzitet u Novom Sadu Tehnički fakultet Mihajlo Pupin Zrenjanin Seminarski rad Predmet: Konkuretno programiranje doc. dr Dejan Lacmanovic Zorica Brkić SI 29/15 Zrenjanin 2018. Softversko inženjerstvo
Programiranje u C-u ili C++-u Pseudo-slučajni brojevi; Dinamička alokacija memorije 1 ZADACI SA ČASA Zadatak 1 Napraviti funkciju koja generišlučajan
 Programiranje u C-u ili C++-u Pseudo-slučajni brojevi; Dinamička alokacija memorije 1 ZADACI SA ČASA Zadatak 1 Napraviti funkciju koja generišlučajan realan broj od 0 i 1. Na standardni izlaz ispisati
Programiranje u C-u ili C++-u Pseudo-slučajni brojevi; Dinamička alokacija memorije 1 ZADACI SA ČASA Zadatak 1 Napraviti funkciju koja generišlučajan realan broj od 0 i 1. Na standardni izlaz ispisati
Slide 1
 PROGRAMSKA PODRŠKA SUSTAVA ZA LOCIRANJE MUNJA U HRVATSKOJ B. Franc, M. Šturlan, I. Uglešić Fakultet elektrotehnike i računarstva Sveučilište u Zagrebu I. Goran Kuliš Končar Inženjering za energetiku i
PROGRAMSKA PODRŠKA SUSTAVA ZA LOCIRANJE MUNJA U HRVATSKOJ B. Franc, M. Šturlan, I. Uglešić Fakultet elektrotehnike i računarstva Sveučilište u Zagrebu I. Goran Kuliš Končar Inženjering za energetiku i
Microsoft Word - 7. cas za studente.doc
 VII Диферeнцни поступак Користи се за решавање диференцијалних једначина. Интервал на коме је дефинисана тражена функција се издели на делова. Усвоји се да се непозната функција између сваке три тачке
VII Диферeнцни поступак Користи се за решавање диференцијалних једначина. Интервал на коме је дефинисана тражена функција се издели на делова. Усвоји се да се непозната функција између сваке три тачке
УНИВЕРЗИТЕТ У НОВОМ САДУ ОБРАЗАЦ 6
 УНИВЕРЗИТЕТ У НОВОМ САДУ ОБРАЗАЦ 6. ФАКУЛТЕТ ТЕХНИЧКИХ НАУКА ИЗВЕШТАЈ О ОЦЕНИ ДОКТОРСКЕ ДИСЕРТАЦИЈЕ -oбавезна садржина- свака рубрика мора бити попуњена (сви подаци уписују се у одговарајућу рубрику, а
УНИВЕРЗИТЕТ У НОВОМ САДУ ОБРАЗАЦ 6. ФАКУЛТЕТ ТЕХНИЧКИХ НАУКА ИЗВЕШТАЈ О ОЦЕНИ ДОКТОРСКЕ ДИСЕРТАЦИЈЕ -oбавезна садржина- свака рубрика мора бити попуњена (сви подаци уписују се у одговарајућу рубрику, а
Dinamičko programiranje Primer 1: Za dati niz naći njegov najduži neopadajući podniz. Defnicija: podniz nekog niza je niz koji se dobija izbacivanjem
 Dinamičko programiranje Primer 1: Za dati niz naći njegov najduži neopadajući podniz. Defnicija: podniz nekog niza je niz koji se dobija izbacivanjem nekih (moguće nijednog) elemenata polaznog niza. Formalno,
Dinamičko programiranje Primer 1: Za dati niz naći njegov najduži neopadajući podniz. Defnicija: podniz nekog niza je niz koji se dobija izbacivanjem nekih (moguće nijednog) elemenata polaznog niza. Formalno,
Microsoft PowerPoint - 03-Slozenost [Compatibility Mode]
![Microsoft PowerPoint - 03-Slozenost [Compatibility Mode]](/thumbs/102/154806426.jpg "Microsoft PowerPoint - 03-Slozenost [Compatibility Mode]") Сложеност алгоритама (Програмирање 2, глава 3, глава 4-4.3) Проблем: класа задатака истог типа Велики број различитих (коректних) алгоритама Величина (димензија) проблема нпр. количина података које треба
Сложеност алгоритама (Програмирање 2, глава 3, глава 4-4.3) Проблем: класа задатака истог типа Велики број различитих (коректних) алгоритама Величина (димензија) проблема нпр. количина података које треба
PROGRAMIRANJE Program je niz naredbi razumljivih računalu koje rješavaju neki problem. Algoritam je postupak raščlanjivanja problema na jednostavnije
 PROGRAMIRANJE Program je niz naredbi razumljivih računalu koje rješavaju neki problem. Algoritam je postupak raščlanjivanja problema na jednostavnije korake. Uz dobro razrađen algoritam neku radnju ćemo
PROGRAMIRANJE Program je niz naredbi razumljivih računalu koje rješavaju neki problem. Algoritam je postupak raščlanjivanja problema na jednostavnije korake. Uz dobro razrađen algoritam neku radnju ćemo
P11.3 Analiza zivotnog veka, Graf smetnji
 Поједностављени поглед на задњи део компајлера Међурепрезентација (Међујезик IR) Избор инструкција Додела ресурса Распоређивање инструкција Инструкције циљне архитектуре 1 Поједностављени поглед на задњи
Поједностављени поглед на задњи део компајлера Међурепрезентација (Међујезик IR) Избор инструкција Додела ресурса Распоређивање инструкција Инструкције циљне архитектуре 1 Поједностављени поглед на задњи
P2.1 Projektovanje paralelnih algoritama 1
 Projektovanje paralelnih algoritama I Uvod Osnove dinamičke paralelizacije 1 Primer: Fibonačijev niz Primer rekurz. računanja Fibonačijevih brojeva: F 0 = 0; F 1 = 1; F i = F i -1 + F i -2 za i 2 Algoritam
Projektovanje paralelnih algoritama I Uvod Osnove dinamičke paralelizacije 1 Primer: Fibonačijev niz Primer rekurz. računanja Fibonačijevih brojeva: F 0 = 0; F 1 = 1; F i = F i -1 + F i -2 za i 2 Algoritam
Zadaci s rješenjima, a ujedno i s postupkom rada biti će nadopunjavani tokom čitave školske godine
 Zadaci s rješenjima, a ujedno i s postupkom rada biti će nadopunjavani tokom čitave školske godine. Tako da će u slijedećem vremenskom periodu nastati mala zbirka koja će biti popraćena s teorijom. Pošto
Zadaci s rješenjima, a ujedno i s postupkom rada biti će nadopunjavani tokom čitave školske godine. Tako da će u slijedećem vremenskom periodu nastati mala zbirka koja će biti popraćena s teorijom. Pošto
ФАКУЛТЕТ ОРГАНИЗАЦИОНИХ НАУКА
 Питања за усмени део испита из Математике 3 I. ДИФЕРЕНЦИЈАЛНЕ ЈЕДНАЧИНЕ 1. Појам диференцијалне једначине. Пикарова теорема. - Написати општи и нормални облик диференцијалне једначине првог реда. - Дефинисати:
Питања за усмени део испита из Математике 3 I. ДИФЕРЕНЦИЈАЛНЕ ЈЕДНАЧИНЕ 1. Појам диференцијалне једначине. Пикарова теорема. - Написати општи и нормални облик диференцијалне једначине првог реда. - Дефинисати:
Microsoft Word - Smerovi 1996
 ИСПИТНИ РОК: СЕПТЕМБАР 2018/2019 СТАРИ НАСТАВНИ ПЛАН И ПРОГРАМ (1996) Смер: СВИ Филозофија и социологија 20.08.2019 Теорија друштвеног развоја 20.08.2019 Програмирање 20.08.2019 Математика I 21.08.2019
ИСПИТНИ РОК: СЕПТЕМБАР 2018/2019 СТАРИ НАСТАВНИ ПЛАН И ПРОГРАМ (1996) Смер: СВИ Филозофија и социологија 20.08.2019 Теорија друштвеног развоја 20.08.2019 Програмирање 20.08.2019 Математика I 21.08.2019
Stručno usavršavanje
 TOPLINSKI MOSTOVI IZRAČUN PO HRN EN ISO 14683 U organizaciji: TEHNIČKI PROPIS O RACIONALNOJ UPORABI ENERGIJE I TOPLINSKOJ ZAŠTITI U ZGRADAMA (NN 128/15, 70/18, 73/18, 86/18) dalje skraćeno TP Čl. 4. 39.
TOPLINSKI MOSTOVI IZRAČUN PO HRN EN ISO 14683 U organizaciji: TEHNIČKI PROPIS O RACIONALNOJ UPORABI ENERGIJE I TOPLINSKOJ ZAŠTITI U ZGRADAMA (NN 128/15, 70/18, 73/18, 86/18) dalje skraćeno TP Čl. 4. 39.
P9.1 Dodela resursa, Bojenje grafa
 Фаза доделе ресурса Ова фаза се у литератури назива и фазом доделе регистара, при чему се под регистрима подразумева скуп ресурса истог типа. Додела регистара променљивама из графа сметњи се обавља тзв.
Фаза доделе ресурса Ова фаза се у литератури назива и фазом доделе регистара, при чему се под регистрима подразумева скуп ресурса истог типа. Додела регистара променљивама из графа сметњи се обавља тзв.
Microsoft PowerPoint - fizika2-kinematika2012
 ФИЗИКА 1. Понедељак, 8. октобар, 1. Кинематика тачке у једној димензији Кинематикакретањаудведимензије 1 Кинематика кретање свејеустањукретања кретање промена положаја тела (уодносу на друга тела) три
ФИЗИКА 1. Понедељак, 8. октобар, 1. Кинематика тачке у једној димензији Кинематикакретањаудведимензије 1 Кинематика кретање свејеустањукретања кретање промена положаја тела (уодносу на друга тела) три
AKTUALNI EU NATJEČAJI
 AKTUALNI EU NATJEČAJI 29.07.2019. Sav sadržaj objavljen u om dokumentu je zaštićen autorskim pravom i/ili relevantnim zakonima o zaštiti žiga. Sadržaj Sadržaj... 2 1. OBZOR 2020... 3 2. NOVO! EIC Accelerator
AKTUALNI EU NATJEČAJI 29.07.2019. Sav sadržaj objavljen u om dokumentu je zaštićen autorskim pravom i/ili relevantnim zakonima o zaštiti žiga. Sadržaj Sadržaj... 2 1. OBZOR 2020... 3 2. NOVO! EIC Accelerator
08 RSA1
 Преглед ЗАШТИТА ПОДАТАКА Шифровање јавним кључем и хеш функције RSA алгоритам Биће објашњено: RSA алгоритам алгоритам прорачунски аспекти ефикасност коришћењем јавног кључа генерисање кључа сигурност проблем
Преглед ЗАШТИТА ПОДАТАКА Шифровање јавним кључем и хеш функције RSA алгоритам Биће објашњено: RSA алгоритам алгоритам прорачунски аспекти ефикасност коришћењем јавног кључа генерисање кључа сигурност проблем
Diapositiva 1
 ROBOTSKA MUŽA Dubravko Pocrnja KONCEPT SISTEMA Robotska muža najintrigantnija je stvar na tržištu, preko 40,000 robota operativno je na farmama diljem svijeta. AMS iliti sistem bez upotrebe ljudskog rada,
ROBOTSKA MUŽA Dubravko Pocrnja KONCEPT SISTEMA Robotska muža najintrigantnija je stvar na tržištu, preko 40,000 robota operativno je na farmama diljem svijeta. AMS iliti sistem bez upotrebe ljudskog rada,
POSLOVNI INFORMACIONI SISTEMI I RA^UNARSKE
 ZNAČAJ RAČUNARSKIH KOMUNIKACIJA U BANKARSKOM POSLOVANJU RAČUNARSKE MREŽE Računarske mreže su nastale kombinacijom računara i telekomunikacija dve tehnologije sa veoma različitom tradicijom i istorijom.
ZNAČAJ RAČUNARSKIH KOMUNIKACIJA U BANKARSKOM POSLOVANJU RAČUNARSKE MREŽE Računarske mreže su nastale kombinacijom računara i telekomunikacija dve tehnologije sa veoma različitom tradicijom i istorijom.
DVD Čička Poljana - Vatrogasne igre
 DOBROVOLJNO VATROGASNO DRUŠTVO ČIČKA POLJANA Poljana Čička145a vatrogasni dom 10410 Novo Čiče Tel: 099/6236-367 e-mail: dvdcickapoljana@gmail.com IBAN:HR1623600001102114276 MB: 02586614 OIB: 43145925932
DOBROVOLJNO VATROGASNO DRUŠTVO ČIČKA POLJANA Poljana Čička145a vatrogasni dom 10410 Novo Čiče Tel: 099/6236-367 e-mail: dvdcickapoljana@gmail.com IBAN:HR1623600001102114276 MB: 02586614 OIB: 43145925932
Microsoft PowerPoint - vezbe 4. Merenja u telekomunikacionim mrežama
 Merenja u telekomunikacionim mrežama Merenja telefonskog saobraćaja Primer 1 - TCBH Na osnovu najviših vrednosti intenziteta saobraćaja datih za 20 mernih dana (tabela), pomoću metode TCBH, pronaći čas
Merenja u telekomunikacionim mrežama Merenja telefonskog saobraćaja Primer 1 - TCBH Na osnovu najviših vrednosti intenziteta saobraćaja datih za 20 mernih dana (tabela), pomoću metode TCBH, pronaći čas
Teorija igara
 Strategije Strategije igrača B igrača A B 1 B 2... B n A 1 e 11 e 12... e 1n A 2 e 21 e 22... e 2n............... A m e m1 e m2... e mn Cilj: Odrediti optimalno ponašanje učesnika u igri Ako je dobitak
Strategije Strategije igrača B igrača A B 1 B 2... B n A 1 e 11 e 12... e 1n A 2 e 21 e 22... e 2n............... A m e m1 e m2... e mn Cilj: Odrediti optimalno ponašanje učesnika u igri Ako je dobitak
DUBINSKA ANALIZA PODATAKA
 DUBINSKA ANALIZA PODATAKA () ASOCIJACIJSKA PRAVILA (ENGL. ASSOCIATION RULE) Studeni 2018. Mario Somek SADRŽAJ Asocijacijska pravila? Oblici učenja pravila Podaci za analizu Algoritam Primjer Izvođenje
DUBINSKA ANALIZA PODATAKA () ASOCIJACIJSKA PRAVILA (ENGL. ASSOCIATION RULE) Studeni 2018. Mario Somek SADRŽAJ Asocijacijska pravila? Oblici učenja pravila Podaci za analizu Algoritam Primjer Izvođenje
Mate_Izvodi [Compatibility Mode]
![Mate_Izvodi [Compatibility Mode]](/thumbs/102/155170958.jpg "Mate_Izvodi [Compatibility Mode]") ИЗВОДИ ФУНКЦИЈЕ ИЗВОДИ ФУНКЦИЈЕ Нека тачке Мо и М чине једну тетиву функције. Нека се тачка М почне приближавати тачки Мо, тј. нека Тачка М постаје тачка Мо, а тетива постаје тангента функције у тачки
ИЗВОДИ ФУНКЦИЈЕ ИЗВОДИ ФУНКЦИЈЕ Нека тачке Мо и М чине једну тетиву функције. Нека се тачка М почне приближавати тачки Мо, тј. нека Тачка М постаје тачка Мо, а тетива постаје тангента функције у тачки
Tutoring System for Distance Learning of Java Programming Language
 Niz (array) Nizovi Niz je lista elemenata istog tipa sa zajedničkim imenom. Redosled elemenata u nizovnoj strukturi je bitan. Konkretnom elementu niza pristupa se preko zajedničkog imena niza i konkretne
Niz (array) Nizovi Niz je lista elemenata istog tipa sa zajedničkim imenom. Redosled elemenata u nizovnoj strukturi je bitan. Konkretnom elementu niza pristupa se preko zajedničkog imena niza i konkretne
1 MATEMATIKA 1 (prva zadaća) Vektori i primjene 1. U trokutu ABC točke M i N dijele stranicu AB na tri jednaka dijela. O
 Vektori i primjene 1. U trokutu ABC točke M i N dijele stranicu AB na tri jednaka dijela. O") http://www.fsb.hr/matematika/ (prva zadać Vektori i primjene. U trokutu ABC točke M i N dijele stranicu AB na tri jednaka dijela. Označite CA= a, CB= b i izrazite vektore CM i CN pomoću vektora a i b..
http://www.fsb.hr/matematika/ (prva zadać Vektori i primjene. U trokutu ABC točke M i N dijele stranicu AB na tri jednaka dijela. Označite CA= a, CB= b i izrazite vektore CM i CN pomoću vektora a i b..
Динамика крутог тела
 Динамика крутог тела. Задаци за вежбу 1. Штап масе m и дужине L се крајем А наслања на храпаву хоризонталну раван, док на другом крају дејствује сила F константног интензитета и правца нормалног на штап.
Динамика крутог тела. Задаци за вежбу 1. Штап масе m и дужине L се крајем А наслања на храпаву хоризонталну раван, док на другом крају дејствује сила F константног интензитета и правца нормалног на штап.
Microsoft PowerPoint - Topic02 - Serbian.ppt
 Tema 2 Kriterijumi kvaliteta za softverske proizvode DAAD Project Joint Course on Software Engineering Humboldt University Berlin, University of Novi Sad, University of Plovdiv, University of Skopje, University
Tema 2 Kriterijumi kvaliteta za softverske proizvode DAAD Project Joint Course on Software Engineering Humboldt University Berlin, University of Novi Sad, University of Plovdiv, University of Skopje, University
broj034.pdf
 Na osnovu člana 39. stav 1. i člana 32. stav 3, a u vezi sa članom 31. i članom 37. stav 1. tačke a) i c) Zakona o komunikacijama ("Službeni glasnik BiH", broj 31/03, 75/06, 32/10 i 98/12) i Pravilom 49/2009
Na osnovu člana 39. stav 1. i člana 32. stav 3, a u vezi sa članom 31. i članom 37. stav 1. tačke a) i c) Zakona o komunikacijama ("Službeni glasnik BiH", broj 31/03, 75/06, 32/10 i 98/12) i Pravilom 49/2009
Microsoft PowerPoint - Topic02 - Serbian.ppt
 Tema 2 Kriterijumi kvaliteta za softverske proizvode DAAD Project Joint Course on Software Engineering Humboldt University Berlin, University of Novi Sad, University of Plovdiv, University of Skopje, University
Tema 2 Kriterijumi kvaliteta za softverske proizvode DAAD Project Joint Course on Software Engineering Humboldt University Berlin, University of Novi Sad, University of Plovdiv, University of Skopje, University
УНИВЕРЗИТЕТ У НОВОМ САДУ ОБРАЗАЦ 6
 УНИВЕРЗИТЕТ У НОВОМ САДУ ОБРАЗАЦ 6. ФАКУЛТЕТ ТЕХНИЧКИХ НАУКА НОВИ САД ИЗВЕШТАЈ О ОЦЕНИ ДОКТОРСКЕ ДИСЕРТАЦИЈЕ -oбавезна садржина- свака рубрика мора бити попуњена (сви подаци уписују се у одговарајућу рубрику,
УНИВЕРЗИТЕТ У НОВОМ САДУ ОБРАЗАЦ 6. ФАКУЛТЕТ ТЕХНИЧКИХ НАУКА НОВИ САД ИЗВЕШТАЈ О ОЦЕНИ ДОКТОРСКЕ ДИСЕРТАЦИЈЕ -oбавезна садржина- свака рубрика мора бити попуњена (сви подаци уписују се у одговарајућу рубрику,
Celobrojno programiranje Rešavamo sledeći poblem celobrojnog programiranja: min c T x Ax = b x 0 x Z n Gde pretpostavljamo da je A celobrojna matrica
 Celobrojno programiranje Rešavamo sledeći poblem celobrojnog programiranja: min c T x Ax = b x 0 x Z n Gde pretpostavljamo da je A celobrojna matrica dimenzije m n, b Z m, c Z n. Takođe, očekuje se da
Celobrojno programiranje Rešavamo sledeći poblem celobrojnog programiranja: min c T x Ax = b x 0 x Z n Gde pretpostavljamo da je A celobrojna matrica dimenzije m n, b Z m, c Z n. Takođe, očekuje se da
Verovatnoća - kolokvijum 17. decembar Profesor daje dva tipa ispita,,,težak ispit i,,lak ispit. Verovatnoća da student dobije težak ispit je
 Verovatnoća - kolokvijum 17. decembar 2016. 1. Profesor daje dva tipa ispita,,,težak ispit i,,lak ispit. Verovatnoća da student dobije težak ispit je 0.8. Ako je ispit težak, verovatnoća da se prvo pitanje
Verovatnoća - kolokvijum 17. decembar 2016. 1. Profesor daje dva tipa ispita,,,težak ispit i,,lak ispit. Verovatnoća da student dobije težak ispit je 0.8. Ako je ispit težak, verovatnoća da se prvo pitanje
Microsoft PowerPoint - IS_G_predavanja_ [Compatibility Mode]
![Microsoft PowerPoint - IS_G_predavanja_ [Compatibility Mode]](/thumbs/103/157511151.jpg "Microsoft PowerPoint - IS_G_predavanja_ [Compatibility Mode]") INŽENJERSKE SIMULACIJE Aleksandar Karač Kancelarija 1111 tel: 44 91 20, lok. 129 akarac@ptf.unze.ba Nermin Redžić Kancelarija 4202 tel: 44 91 20, lok.128 nermin.redzic@ptf.unze.ba www.ptf.unze.ba http://ptf.unze.ba/inzenjerske-simulacije
INŽENJERSKE SIMULACIJE Aleksandar Karač Kancelarija 1111 tel: 44 91 20, lok. 129 akarac@ptf.unze.ba Nermin Redžić Kancelarija 4202 tel: 44 91 20, lok.128 nermin.redzic@ptf.unze.ba www.ptf.unze.ba http://ptf.unze.ba/inzenjerske-simulacije
Funkcije predavač: Nadežda Jakšić
 Funkcije predavač: Nadežda Jakšić funkcije delovi programa koji izvršavaju neki zadatak, celinu; dele na ugrađene, korisničke i main funkciju ugrađene funkcije printf,scanf... da bi se one izvršile potrebno
Funkcije predavač: Nadežda Jakšić funkcije delovi programa koji izvršavaju neki zadatak, celinu; dele na ugrađene, korisničke i main funkciju ugrađene funkcije printf,scanf... da bi se one izvršile potrebno
Microsoft Word - III godina - EA - Metodi vjestacke inteligencije
 Школска година 2018/2019. Предмет Методи вјештачке интелигенције Шифра предмета 2284 Студијски програм Електроенергетика и аутоматика Циклус студија Година студија Семестар Број студената Број група за
Школска година 2018/2019. Предмет Методи вјештачке интелигенције Шифра предмета 2284 Студијски програм Електроенергетика и аутоматика Циклус студија Година студија Семестар Број студената Број група за
P1.1 Analiza efikasnosti algoritama 1
 Analiza efikasnosti algoritama I Asimptotske notacije Master metoda (teorema) 1 Asimptotske notacije (1/2) Služe za opis vremena izvršenja algoritma T(n) gde je n N veličina ulaznih podataka npr. br. elemenata
Analiza efikasnosti algoritama I Asimptotske notacije Master metoda (teorema) 1 Asimptotske notacije (1/2) Služe za opis vremena izvršenja algoritma T(n) gde je n N veličina ulaznih podataka npr. br. elemenata
Microsoft PowerPoint - ravno kretanje [Compatibility Mode]
![Microsoft PowerPoint - ravno kretanje [Compatibility Mode]](/thumbs/99/142687321.jpg "Microsoft PowerPoint - ravno kretanje [Compatibility Mode]") КИНЕМАТИКА КРУТОГ ТЕЛ (наставак) 1. транслаторно кретање. обртање тела око непокретне осе 3. сферно кретање 4. опште кретање 5. раванско (равно) кретање 1 Opšte kretanje krutog tela = ( t) y = y( t) y
КИНЕМАТИКА КРУТОГ ТЕЛ (наставак) 1. транслаторно кретање. обртање тела око непокретне осе 3. сферно кретање 4. опште кретање 5. раванско (равно) кретање 1 Opšte kretanje krutog tela = ( t) y = y( t) y
ЕКОНОМСКИ ФАКУЛТЕТ УНИВЕРЗИТЕТА У ПРИШТИНИ КОСОВСКА МИТРОВИЦА
 МАТЕМАТИКА ЗАДАЦИ ЗА ПРИЈЕМНИ ИСПИТ 1. Израчунати вредност израза: а) ; б). 2. Израчунати вредност израза:. 3. Израчунати вредност израза:. 4. Израчунати вредност израза: ако је. 5. Израчунати вредност
МАТЕМАТИКА ЗАДАЦИ ЗА ПРИЈЕМНИ ИСПИТ 1. Израчунати вредност израза: а) ; б). 2. Израчунати вредност израза:. 3. Израчунати вредност израза:. 4. Израчунати вредност израза: ако је. 5. Израчунати вредност
Slide 1
 OSNOVNI POJMOVI Naredba je uputa računalu za obavljanje određene radnje. Program je niz naredbi razumljivih računalu koje rješavaju neki problem. Pisanje programa zovemo programiranje. Programski jezik
OSNOVNI POJMOVI Naredba je uputa računalu za obavljanje određene radnje. Program je niz naredbi razumljivih računalu koje rješavaju neki problem. Pisanje programa zovemo programiranje. Programski jezik
УНИВЕРЗИТЕТ У НИШУ ПРИРОДНО-МАТЕМАТИЧКИ ФАКУЛТЕТ Департман за рачунарске науке Писмени део испита из предмета Увод у рачунарство 1. [7 пое
 УНИВЕРЗИТЕТ У НИШУ ПРИРОДНО-МАТЕМАТИЧКИ ФАКУЛТЕТ Департман за рачунарске науке 30.06.2018. Писмени део испита из предмета Увод у рачунарство 1. [7 поена] Методом МакКласкија минимизарити систем прекидачких
УНИВЕРЗИТЕТ У НИШУ ПРИРОДНО-МАТЕМАТИЧКИ ФАКУЛТЕТ Департман за рачунарске науке 30.06.2018. Писмени део испита из предмета Увод у рачунарство 1. [7 поена] Методом МакКласкија минимизарити систем прекидачких
ДРУШТВО ФИЗИЧАРА СРБИЈЕ МИНИСТАРСТВО ПРОСВЕТЕ И СПОРТА РЕПУБЛИКЕ СРБИЈЕ Задаци за републичко такмичење ученика средњих школа 2006/2007 године I разред
 ДРУШТВО ФИЗИЧАРА СРБИЈЕ МИНИСТАРСТВО ПРОСВЕТЕ И СПОРТА РЕПУБЛИКЕ СРБИЈЕ Задаци за републичко такмичење ученика средњих школа 006/007 године разред. Електрични систем се састоји из отпорника повезаних тако
ДРУШТВО ФИЗИЧАРА СРБИЈЕ МИНИСТАРСТВО ПРОСВЕТЕ И СПОРТА РЕПУБЛИКЕ СРБИЈЕ Задаци за републичко такмичење ученика средњих школа 006/007 године разред. Електрични систем се састоји из отпорника повезаних тако
2. Globalna svojstva realnih funkcija Denicija 2.1 Za funkciju f : A kaemo da je:! R; A R ome dena odozgor ako postoji M 2 R takav da je (8x 2 A) (f (
 (f (") 2. Globalna svojstva realnih funkcija Denicija 2.1 Za funkciju f : A kaemo da je:! R; A R ome dena odozgor ako postoji M 2 R takav da je (8 2 A) (f () M) ; ome dena odozdol ako postoji m 2 R takav da je
2. Globalna svojstva realnih funkcija Denicija 2.1 Za funkciju f : A kaemo da je:! R; A R ome dena odozgor ako postoji M 2 R takav da je (8 2 A) (f () M) ; ome dena odozdol ako postoji m 2 R takav da je
SISTEM ZA VIDEO NADZOR TEŠKO DOSTUPNIH ILI NEDOSTUPNIH VELIKIH TERITORIJA Video nadzor velikih površina zahteva razvoj složene stacionarne infrastrukt
 SISTEM ZA VIDEO NADZOR TEŠKO DOSTUPNIH ILI NEDOSTUPNIH VELIKIH TERITORIJA Video nadzor velikih površina zahteva razvoj složene stacionarne infrastrukture koja ima za cilj snimanje i prenos signala preko
SISTEM ZA VIDEO NADZOR TEŠKO DOSTUPNIH ILI NEDOSTUPNIH VELIKIH TERITORIJA Video nadzor velikih površina zahteva razvoj složene stacionarne infrastrukture koja ima za cilj snimanje i prenos signala preko
Metodologija normiranja rada kontrolora i posada pauk vozila
 Dragan Jovanović Direktor sektora za IT JKP Parking Servis Novi Sad Menadžment JKP Parking Servisa Novi Sad je nakon uvoďenja SMS sistema naplate parkinga uvideo potrebu za normiranjem rada kontrolora.
Dragan Jovanović Direktor sektora za IT JKP Parking Servis Novi Sad Menadžment JKP Parking Servisa Novi Sad je nakon uvoďenja SMS sistema naplate parkinga uvideo potrebu za normiranjem rada kontrolora.
Microsoft Word - CAD sistemi
 U opštem slučaju, se mogu podeliti na 2D i 3D. 2D Prvo pojavljivanje 2D CAD sistema se dogodilo pre više od 30 godina. Do tada su inženjeri koristili table za crtanje (kulman), a zajednički jezik komuniciranja
U opštem slučaju, se mogu podeliti na 2D i 3D. 2D Prvo pojavljivanje 2D CAD sistema se dogodilo pre više od 30 godina. Do tada su inženjeri koristili table za crtanje (kulman), a zajednički jezik komuniciranja
PowerPoint Presentation
 Upravljanje vremenom Praktikum iz poslovne komunikacije i prezentacije Jelica Cincović (jelica@etf.rs) Elektrotehnički fakultet, Univerzitet u Beogradu 2018/2019 Uvod 24 sata za organizovanje našeg dana
Upravljanje vremenom Praktikum iz poslovne komunikacije i prezentacije Jelica Cincović (jelica@etf.rs) Elektrotehnički fakultet, Univerzitet u Beogradu 2018/2019 Uvod 24 sata za organizovanje našeg dana
Računarski praktikum I - Vježbe 11 - Funktori
 Prirodoslovno-matematički fakultet Matematički odsjek Sveučilište u Zagrebu RAČUNARSKI PRAKTIKUM I Vježbe 11 - Funktori v2018/2019. Sastavio: Zvonimir Bujanović Funkcijski objekti (funktori) Objekt klase
Prirodoslovno-matematički fakultet Matematički odsjek Sveučilište u Zagrebu RAČUNARSKI PRAKTIKUM I Vježbe 11 - Funktori v2018/2019. Sastavio: Zvonimir Bujanović Funkcijski objekti (funktori) Objekt klase
(Microsoft Word vje\236ba - LIMES FUNKCIJE.doc)
") Zadatak Pokažite, koristeći svojstva esa, da je ( 6 ) 5 Svojstva esa funkcije u točki: Ako je k konstanta, k k c c c f ( ) L i g( ) M, tada vrijedi: c c [ f ( ) ± g( ) ] c c f ( ) ± g( ) L ± M c [ f (
Zadatak Pokažite, koristeći svojstva esa, da je ( 6 ) 5 Svojstva esa funkcije u točki: Ako je k konstanta, k k c c c f ( ) L i g( ) M, tada vrijedi: c c [ f ( ) ± g( ) ] c c f ( ) ± g( ) L ± M c [ f (
Microsoft Word - Pravilnik o jedinstvenom evropskom broju 112 SL
 Na osnovu člana 142 st. 3 i 5 i člana 143 stav 4 Zakona o elektronskim komunikacijama ( Službeni list CG", broj 40/13) Ministarstvo za informaciono društvo i telekomunikacije, uz saglasnost Ministarstva
Na osnovu člana 142 st. 3 i 5 i člana 143 stav 4 Zakona o elektronskim komunikacijama ( Službeni list CG", broj 40/13) Ministarstvo za informaciono društvo i telekomunikacije, uz saglasnost Ministarstva
VEŽBE IZ OPERACIONIH ISTRAŽIVANJA
 VEŽBE IZ OPERACIONIH ISTRAŽIVANJA Glava 4 1. Metoda grananja i odsecanja 2. Metoda grananja i ograničavanja 3. Metoda implicitnog prebrojavanja MARIJA IVANOVIĆ marijai@math.rs Metoda grananja i odsecanja
VEŽBE IZ OPERACIONIH ISTRAŽIVANJA Glava 4 1. Metoda grananja i odsecanja 2. Metoda grananja i ograničavanja 3. Metoda implicitnog prebrojavanja MARIJA IVANOVIĆ marijai@math.rs Metoda grananja i odsecanja
Microsoft Word - ETH2_EM_Amperov i generalisani Amperov zakon - za sajt
 Полупречник унутрашњег проводника коаксијалног кабла је Спољашњи проводник је коначне дебљине унутрашњег полупречника и спољашњег Проводници кабла су начињени од бакра Кроз кабл протиче стална једносмерна
Полупречник унутрашњег проводника коаксијалног кабла је Спољашњи проводник је коначне дебљине унутрашњег полупречника и спољашњег Проводници кабла су начињени од бакра Кроз кабл протиче стална једносмерна
untitled
 UPOTREBA MOBILNIH TELEFONA TOKOM VOŽNJE Svetlana Čičević, Marjana Čubranić-Dobrodolac, Saobraćajni fakultet, Beograd Rezultat rada na projektu Ministarstva za nauku i tehnološki razvoj Republike Srbije
UPOTREBA MOBILNIH TELEFONA TOKOM VOŽNJE Svetlana Čičević, Marjana Čubranić-Dobrodolac, Saobraćajni fakultet, Beograd Rezultat rada na projektu Ministarstva za nauku i tehnološki razvoj Republike Srbije
Zadaci s pismenih ispita iz matematike 2 s rješenjima MATEMATIKA II x 4y xy 2 x y 1. Odredite i skicirajte prirodnu domenu funkcije cos ln
 Zadaci s pismenih ispita iz matematike s rješenjima 0004 4 Odredite i skicirajte prirodnu domenu funkcije cos ln f, Arc Izračunajte volumen tijela omeđenog plohama z e, 9 i z 0 Izračunajte ln e d,, ln
Zadaci s pismenih ispita iz matematike s rješenjima 0004 4 Odredite i skicirajte prirodnu domenu funkcije cos ln f, Arc Izračunajte volumen tijela omeđenog plohama z e, 9 i z 0 Izračunajte ln e d,, ln
Poreska utaja
 Poreska utaja Šta je poreska utaja? Poreski sud, slučaj Mandt v. Comm r, TC Memo, 1955-226, stated: Prevara ukazuje na nepoštenje, svjesnu i proračunatu namjeru u vrijeme kad su sporne prijave poreza pripremljene
Poreska utaja Šta je poreska utaja? Poreski sud, slučaj Mandt v. Comm r, TC Memo, 1955-226, stated: Prevara ukazuje na nepoštenje, svjesnu i proračunatu namjeru u vrijeme kad su sporne prijave poreza pripremljene
505
 505. На основу члана 11 став 3 Закона о заштити ваздуха ( Службени лист ЦГ", број 25/10), Влада Црне Горе на сједници од 8.јула 2010. године, донијела је УРЕДБУ О УСПОСТАВЉАЊУ МРЕЖЕ МЈЕРНИХ МЈЕСТА ЗА ПРАЋЕЊЕ
505. На основу члана 11 став 3 Закона о заштити ваздуха ( Службени лист ЦГ", број 25/10), Влада Црне Горе на сједници од 8.јула 2010. године, донијела је УРЕДБУ О УСПОСТАВЉАЊУ МРЕЖЕ МЈЕРНИХ МЈЕСТА ЗА ПРАЋЕЊЕ
6-8. ČAS Celobrojno programiranje Rešavamo sledeći poblem celobrojnog programiranja: Gde pretpostavljamo da je A celobrojna matrica dimenzije,. Takođe
 6-8. ČAS Celobrojno programiranje Rešavamo sledeći poblem celobrojnog programiranja: Gde pretpostavljamo da je A celobrojna matrica dimenzije,. Takođe, očekuje se da su koordinate celobrojne. U slučaju
6-8. ČAS Celobrojno programiranje Rešavamo sledeći poblem celobrojnog programiranja: Gde pretpostavljamo da je A celobrojna matrica dimenzije,. Takođe, očekuje se da su koordinate celobrojne. U slučaju
Neuronske mreže
 Neuronske mreže: Genetički algoritmi Prof. dr. sc. Sven Lončarić Fakultet elektrotehnike i računarstva sven.loncaric@fer.hr http://ipg.zesoi.fer.hr 1 Uvod U mnogim primjenama pojavljuje se problem optimizacije
Neuronske mreže: Genetički algoritmi Prof. dr. sc. Sven Lončarić Fakultet elektrotehnike i računarstva sven.loncaric@fer.hr http://ipg.zesoi.fer.hr 1 Uvod U mnogim primjenama pojavljuje se problem optimizacije
Prostorna kalibracija LYSO detektora osetljivog na poziciju
 Prostorna kalibracija LYSO detektora osetljivog na poziciju Brankica Anđelić df.brankica.andjelic@student.pmf.uns.ac.rs Departman za fiziku, Univerzitet u Novom Sadu 3. oktobar 215. Brankica Anđelić Prostorna
Prostorna kalibracija LYSO detektora osetljivog na poziciju Brankica Anđelić df.brankica.andjelic@student.pmf.uns.ac.rs Departman za fiziku, Univerzitet u Novom Sadu 3. oktobar 215. Brankica Anđelić Prostorna
Newtonova metoda za rješavanje nelinearne jednadžbe f(x)=0
=0") za rješavanje nelinearne jednadžbe f (x) = 0 Ime Prezime 1, Ime Prezime 2 Odjel za matematiku Sveučilište u Osijeku Seminarski rad iz Matematičkog praktikuma Ime Prezime 1, Ime Prezime 2 za rješavanje
za rješavanje nelinearne jednadžbe f (x) = 0 Ime Prezime 1, Ime Prezime 2 Odjel za matematiku Sveučilište u Osijeku Seminarski rad iz Matematičkog praktikuma Ime Prezime 1, Ime Prezime 2 za rješavanje
PowerPoint-Präsentation
 3 Predavanje 3 Mart 2017. FAKULTET ZAŠTITE NA RADU U NIŠU Predavanje 3. 1 Prof. dr Milan Đ. Blagojević 3 Faze razvoja požara, razvoj u zatvorenom prostoru Mart 2017. FAKULTET ZAŠTITE NA RADU U NIŠU Predavanje
3 Predavanje 3 Mart 2017. FAKULTET ZAŠTITE NA RADU U NIŠU Predavanje 3. 1 Prof. dr Milan Đ. Blagojević 3 Faze razvoja požara, razvoj u zatvorenom prostoru Mart 2017. FAKULTET ZAŠTITE NA RADU U NIŠU Predavanje
Microsoft Word - Akreditacija 2013
 07.10.2017 ОСНОВНЕ АКАДЕМСКЕ СТУДИЈЕ (АКРЕДИТАЦИЈА 2013) Модул: СВИ Година I Од II до IV Семестар I II IV-VIII Лабораторијски практикум - Увод у рачунарство Алгоритми и програмирање Математика 1 Математика
07.10.2017 ОСНОВНЕ АКАДЕМСКЕ СТУДИЈЕ (АКРЕДИТАЦИЈА 2013) Модул: СВИ Година I Од II до IV Семестар I II IV-VIII Лабораторијски практикум - Увод у рачунарство Алгоритми и програмирање Математика 1 Математика
SISTEM ZA VIDEO NADZOR TEŠKO DOSTUPNIH ILI NEDOSTUPNIH VELIKIH TERITORIJA Video nadzor velikih površina zahteva razvoj složene stacionarne infrastrukt
 SISTEM ZA VIDEO NADZOR TEŠKO DOSTUPNIH ILI NEDOSTUPNIH VELIKIH TERITORIJA Video nadzor velikih površina zahteva razvoj složene stacionarne infrastrukture koja ima za cilj snimanje i prenos signala preko
SISTEM ZA VIDEO NADZOR TEŠKO DOSTUPNIH ILI NEDOSTUPNIH VELIKIH TERITORIJA Video nadzor velikih površina zahteva razvoj složene stacionarne infrastrukture koja ima za cilj snimanje i prenos signala preko
Maksimalni protok kroz mrežu - Ford-Fulkerson, Edmonds-Karp
 Maksimalni protok kroz mrežu - Ford-Fulkerson, Edmonds-Karp PMF-MO Seminar iz kolegija Oblikovanje i analiza algoritama 22.1.2019. mrežu - Ford-Fulkerson, Edmonds-Karp 22.1.2019. 1 / 35 Uvod - definicije
Maksimalni protok kroz mrežu - Ford-Fulkerson, Edmonds-Karp PMF-MO Seminar iz kolegija Oblikovanje i analiza algoritama 22.1.2019. mrežu - Ford-Fulkerson, Edmonds-Karp 22.1.2019. 1 / 35 Uvod - definicije
Numeričke metode u fizici 1, Projektni zadataci 2018./ Za sustav običnih diferencijalnih jednadžbi, koje opisuju kretanje populacije dviju vrs
 Numeričke metode u fizici, Projektni zadataci 8./9.. Za sustav običnih diferencijalnih jednadžbi, koje opisuju kretanje populacije dviju vrsta životinja koje se nadmeću za istu hranu, dx ( dt = x x ) xy
Numeričke metode u fizici, Projektni zadataci 8./9.. Za sustav običnih diferencijalnih jednadžbi, koje opisuju kretanje populacije dviju vrsta životinja koje se nadmeću za istu hranu, dx ( dt = x x ) xy
2. Globalna svojstva realnih funkcija Denicija 2.1 Za funkciju f : A kaemo da je:! R; A R ome dena odozgor ako postoji M 2 R takav da je (8x 2 A) (f (
 (f (") 2. Globalna svojstva realnih funkcija Denicija 2.1 Za funkciju f : A kaemo da je:! R; A R ome dena odozgor ako postoji M 2 R takav da je (8x 2 A) (f (x) M) ; ome dena odozdol ako postoji m 2 R takav da
2. Globalna svojstva realnih funkcija Denicija 2.1 Za funkciju f : A kaemo da je:! R; A R ome dena odozgor ako postoji M 2 R takav da je (8x 2 A) (f (x) M) ; ome dena odozdol ako postoji m 2 R takav da
C2 MATEMATIKA 1 ( , 3. kolokvij) 1. Odredite a) lim x arctg(x2 ), b) y ( 1 2 ) ako je y = arctg(4x 2 ). c) y ako je y = (sin x) cos x. (15 b
 1. Odredite a) lim x arctg(x2 ), b) y ( 1 2 ) ako je y = arctg(4x 2 ). c) y ako je y = (sin x) cos x. (15 b") C2 MATEMATIKA 1 (20.12.2011., 3. kolokvij) 1. Odredite a) lim x arctg(x2 ), b) y ( 1 2 ) ako je y = arctg(4x 2 ). c) y ako je y = (sin x) cos x. 2. Izračunajte osjenčanu površinu sa slike. 3. Automobil
C2 MATEMATIKA 1 (20.12.2011., 3. kolokvij) 1. Odredite a) lim x arctg(x2 ), b) y ( 1 2 ) ako je y = arctg(4x 2 ). c) y ako je y = (sin x) cos x. 2. Izračunajte osjenčanu površinu sa slike. 3. Automobil
Microsoft Word - Akreditacija 2013
 ОСНОВНЕ АКАДЕМСКЕ СТУДИЈЕ (АКРЕДИТАЦИЈА 2013) Модул: СВИ Година I Од II до IV Семестар I II IV-VII 18.09.2017 Алгоритми и програмирање 19.09.2017 Математика 1 20.09.2017 Математика 2 21.09.2017 Увод у
ОСНОВНЕ АКАДЕМСКЕ СТУДИЈЕ (АКРЕДИТАЦИЈА 2013) Модул: СВИ Година I Од II до IV Семестар I II IV-VII 18.09.2017 Алгоритми и програмирање 19.09.2017 Математика 1 20.09.2017 Математика 2 21.09.2017 Увод у
Microsoft Word - Akreditacija 2013
 ИСПИТНИ РОК: ОКТОБАР 2 2017/2018 ОСНОВНЕ АКАДЕМСКЕ СТУДИЈЕ (АКРЕДИТАЦИЈА 2013) Модул: СВИ Година I Од II до IV Семестар I II IV-VIII Лабораторијски практикум - Алгоритми и програмирање Лабораторијски практикум
ИСПИТНИ РОК: ОКТОБАР 2 2017/2018 ОСНОВНЕ АКАДЕМСКЕ СТУДИЈЕ (АКРЕДИТАЦИЈА 2013) Модул: СВИ Година I Од II до IV Семестар I II IV-VIII Лабораторијски практикум - Алгоритми и програмирање Лабораторијски практикум
Seminar 13 (Tok funkcije) Obavezna priprema za seminar nalazi se na drugoj stranici ovog materijala. Ove materijale obražujemo na seminarima do kraja
 Obavezna priprema za seminar nalazi se na drugoj stranici ovog materijala. Ove materijale obražujemo na seminarima do kraja") Seminar 13 (Tok funkcije) Obavezna priprema za seminar nalazi se na drugoj stranici ovog materijala. Ove materijale obražujemo na seminarima do kraja semestra. Potrebno predznanje Ovaj seminar saºima sva
Seminar 13 (Tok funkcije) Obavezna priprema za seminar nalazi se na drugoj stranici ovog materijala. Ove materijale obražujemo na seminarima do kraja semestra. Potrebno predznanje Ovaj seminar saºima sva
Microsoft Word - Akreditacija 2013
 ИСПИТНИ РОК: СЕПТЕМБАР 2018/2019 ОСНОВНЕ АКАДЕМСКЕ СТУДИЈЕ (АКРЕДИТАЦИЈА 2013) Модул: СВИ Година I Од II до IV Семестар I II IV-VII Лабораторијски практикум Физика Лабораторијски практикум - Увод у рачунарство
ИСПИТНИ РОК: СЕПТЕМБАР 2018/2019 ОСНОВНЕ АКАДЕМСКЕ СТУДИЈЕ (АКРЕДИТАЦИЈА 2013) Модул: СВИ Година I Од II до IV Семестар I II IV-VII Лабораторијски практикум Физика Лабораторијски практикум - Увод у рачунарство
Problemi zadovoljavanja ogranicenja.
 I122 Osnove umjetne inteligencije Tema:. 7.1.2016. predavač: Darija Marković asistent: Darija Marković 1 I122 Osnove umjetne inteligencije. 2/26 (PZO) Problem zadovoljavanja ograničenja sastoji se od 3
I122 Osnove umjetne inteligencije Tema:. 7.1.2016. predavač: Darija Marković asistent: Darija Marković 1 I122 Osnove umjetne inteligencije. 2/26 (PZO) Problem zadovoljavanja ograničenja sastoji se od 3
PowerPoint Presentation
 Combis Digital Workplace Hrvoje Dunkić, Combis Marko Ćorić, Combis Do svega, uvijek Stari i Novi zaposlenici, angažiranost Daj više u manje vremena Previše je informacija Digitalno radno mjesto? Prihvatimo
Combis Digital Workplace Hrvoje Dunkić, Combis Marko Ćorić, Combis Do svega, uvijek Stari i Novi zaposlenici, angažiranost Daj više u manje vremena Previše je informacija Digitalno radno mjesto? Prihvatimo
Microsoft Word - Cjelovito.docx
 Okrugli stol Razvoj i primjena robotike u Hrvatskoj Perspektive razvoja i primjene zračne robotike u Hrvatskoj Prof. dr. sc. Stjepan Bogdan Predavanjem će se predstaviti pregled trenutnog stanje zračne
Okrugli stol Razvoj i primjena robotike u Hrvatskoj Perspektive razvoja i primjene zračne robotike u Hrvatskoj Prof. dr. sc. Stjepan Bogdan Predavanjem će se predstaviti pregled trenutnog stanje zračne
GENETSKI TREND PRINOSA MLEKA I MLEČNE MASTI U PROGENOM TESTU BIKOVA ZA VEŠTAČKO OSEMENJAVANJE
 IV SEMINAR ODGAJIVAČKIH ORGANIZACIJA U STOČARSTVU REPUBLIKE SRBIJE HOTEL ĐERDAP TURIST 01.- 04. April 2018. Procena oplemenjivačkih vrednosti u stočarstvu ES( G) h 2 i L r IH Prof. dr Snežana Trivunović,
IV SEMINAR ODGAJIVAČKIH ORGANIZACIJA U STOČARSTVU REPUBLIKE SRBIJE HOTEL ĐERDAP TURIST 01.- 04. April 2018. Procena oplemenjivačkih vrednosti u stočarstvu ES( G) h 2 i L r IH Prof. dr Snežana Trivunović,