VELEUČILIŠTE U BJELOVARU PREDDIPLOMSKI STRUČNI STUDIJ MEHATRONIKA Digitalna obrada i analiza slike unutar LabVIEW razvojnog okruženja Završni rad br.
|
|
|
- Нађа Мићић
- пре 5 година
- Прикази:
Транскрипт
1 VELEUČILIŠTE U BJELOVARU PREDDIPLOMSKI STRUČNI STUDIJ MEHATRONIKA Digitalna obrada i analiza slike unutar LabVIEW razvojnog okruženja Završni rad br. 10/MEH/2018 Ivan Šimunović Bjelovar, Prosinac 2018.
2
3 Zahvala Zahvaljujem svim profesorima Veleučilišta u Bjelovaru koji su svojim zanimljivim i zabavnim predavanjima te svojom srdačnošću i iznimnom pristupačnošću omogućili da mi ove godine studiranja ostanu u lijepom sjećanju. Također zahvaljujem tvrtki Data Link na ustupljenoj stručnoj literaturi koja je uvelike pridonijela kvaliteti ovog rada.
4 Sadržaj 1. Uvod LABVIEW Vizijski moduli i upravljački programi VIZIJSKI SUSTAV Web kamera Temeljni parametri vizijskog sustava Osvjetljenje vizijskog sustava KALIBRACIJA KAMERE AKVIZICIJA SLIKE OBRADA SLIKE Sustavi reprezentacije boje Prostorno filtriranje Metoda praga Morfološke operacije MACHINE VISION Prepoznavanje oblika Prepoznavanje boje ZAKLJUČAK LITERATURA OZNAKE I KRATICE SAŽETAK ABSTRACT PRILOZI... 50
5
6 1. Uvod Vizijski sustavi današnjice služe za mjerenje, prepoznavanje željenog predmeta, inspekcije, sortiranje i mogu se lako primijeniti u druge svrhe. Stoga je ideja o kameri kao senzoru uz podršku LabVIEW programskog alata za obradu slike odlična tema za razradu završnog rada. U radu je opisan vizijski sustav popraćen podrškom LabVIEW programskog alata uz module za obradu slike. Iako obrada slike ima široku primjenu kao na primjer u medicini, astronomiji, multimediji ovaj rad baziran je na praktičnoj primjeni vizijskih sustava i obrade slike u industrijskim aplikacijama. Vizijski sustav u industrijskoj primjeni može se koristiti u aplikacijama kontrole prisutnosti, lociranju značajki, prepoznavanju objekata, sortiranju, kontrole kvalitete i slično. U drugom poglavlju rada opisan je rad s modulima i komponente koje koristi LabVIEW programski alat. Za uspostavu vizijskog sustava programskim alatom LabVIEW potrebni su dodatni moduli za akviziciju slike i procesiranje slike te upravljački programi ulaznog senzora. LabVIEW je grafički programski alat u kojem se programira drag and drop tehnikom. LabVIEW sadrži tako zvane blokove ili virtualne instrumente koje se kraće još zovu i VI. U radu je ukratko opisano osvjetljenje i komponente vizijskog sustava koje znatno utječu na kvalitetu cijelog sustava. Kako bi mjerenja tijekom inspekcije bila što točnija potrebno je kalibrirati sustav. LabVIEW programski alat nudi nekoliko prikladnih kalibracijskih metoda, a koja će se odabrati ovisi o namjeni aplikacije i zadatku. Nakon akvizicije sliku je potrebno prilagoditi mjerenju. U poglavlju obrada slike objašnjavaju se prostorni filteri kojima se vrše razna poboljšavanja slike ovisno o uvjetima snimanja. U daljem nastavku poglavlja obrada slike objasniti će se svrha morfoloških operacija i prikazati će se njihov utjecaj na binarnoj slici. Kao zaključni dio rada biti će opisana aplikacija klasifikacije objekata i aplikacija prepoznavanje boje. 1
7 2. LABVIEW LabVIEW (Laboratory Virtual Instrument Engineering Workbench) je grafički programski jezik čije aplikacije služe za testiranje, mjerenje te kontrolu s brzim pristupom računalnoj opremi i podatcima[1]. LabVIEW programski alat kao grafički jezik s dodatnim modulima i širokom bibliotekom mnogobrojnih funkcija, generatora signala te funkcija za procesiranje i analizu odličan je za izradu prototipskih aplikacija. Kako bi ispunio zahtjeve aplikacije koja prikuplja, manipulira i obrađuje sliku s kamere, unutar LabVIEW programskog alata na raspolaganju je bogata biblioteka i moduli razvijeni upravo za tu namjenu. Primjerice moduli Vision development module (VDM) i Vision acquisition software (VAS) opisani u nastavku ovog poglavlja omogućuju obradu i akviziciju slike. Sučelje LabVIEW programskog alata sastoji se od dva glavna prozora od kojih se jedan naziva prednji panel, a drugi blok dijagram. Prednji panel koristi se kao grafičko i upravljačko sučelje. Na njemu se nalaze indikatori, kontrole i očitane vrijednosti mogućih instrumenata. Blok dijagram prozor koristi se za programiranje odnosno za pisanje grafičkog koda. Ova dva prozora su međusobno povezana na način da se dodavanjem jedne kontrole ili indikatora na prednji panel pojavljuje pripadajući element na blok dijagramu. Nakon pisanja koda unutar blok dijagrama završava kreiranje virtualnog instrumenta (VI) kako se i naziva svaka aplikacija u LabVIEW programskom alatu. Podatci blok dijagramom putuju kroz žice. LabVIEW programski alat sadrži tri uobičajena tipa podatka, a to su numerički, binarni te string tip podatka. Osim uobičajenih tipova podatka u vizijskoj aplikaciji pojaviti će se tipovi podataka kao što je podatak o fotografiji ili slici koju kamera pribavi. Ovaj tip podatka ili informacije je prikazan kao ljubičasta žica. Slika 2.1 prikazuje razne tipove podataka. 2
8 Slika 2.1 : Podatkovne žice [2] 3
9 2.1 Vizijski moduli i upravljački programi Za vizijsku aplikaciju potrebno je koristiti dodatne module i upravljačke programe, kao što je primjerice Vision development module (VDM). Ovaj modul pruža mogućnost razvoja aplikacija strojne vizije i sadrži dodatne blokove za obradu slike koji se mogu pronaći na paleti funkcija pod izbornikom Vision and Motion. VDM u sebi sadrži alat Vision assistant koji služi za brzu izradu prototipa aplikacije bez dodatnog programiranja. Iznimno je koristan za razvoj aplikacija vizije zbog svog pojednostavljenog i pristupačnog sučelja. Općenito VDM blokovi koriste se za obradu i analizu slike. Neki od primjera korištenja tih blokova su: izrada histograma, filtriranje, metoda praga, analiza čestica, detekcija ruba, prepoznavanje oblika. Za implementaciju kamere u sustav potrebni su upravljački programi NI-IMAQ, NI-IMAQ I/O, NI-IMAQdx koji će omogućiti komuniciranje programskog alat s kamerom. Ovi upravljački paketi instalirani su pomoću NI Vision Acquisition Softwarea (VAS). VAS je modul koji je odgovoran za akviziciju slike s kamere ili drugog uređaja. Svaki upravljački program uključuje skup blokova koji se mogu koristiti za visoku razinu kontrole različitih uređaja za snimanje slika. U nastavku je prikazano za koje uređaje se koristi koji upravljački program te koje standarde i komunikacijske protokole podržavaju. 4
10 NI-IMAQ upravljački program podržava samo NI hardverske uređaje i potreban je za korištenje sljedećih uređaja za prikupljanje slike: National Instrument frame grabers National Instruments frame grabers with paralell communication National Instruments analog frame grabers National Instruments 17xx smart camera NI-IMAQdx upravljački softver potreban je za korištenje uređaja za prikupljanje slika trećih strana koji koriste sljedeće protokole i standarde: Gigabit Ethernet kamere koji podržavaju GigE Vision FireWire IEEE 1394 kamere USB 2.0 kamere koji podržavaju Microsoft DirectShow USB 3.0 kamere koji podržavaju USB3 Vision NI-IMAQ I / O upravljački program manji je upravljački program koji se koristi isključivo za programiranje NI Vision RIO kartica za snimanje slika, uključujući sljedeće kartice: NI PCIe-8255R NI PCI-8254R NI PCIe-8237R NI PCIe-1473R NI PCIe-1473R-LX110 NI 1483 modul FlexRIO adaptacije [3] Na slici 2.2 označeni su blokovi koji su dostupni na paleti funkcija nakon instalacije VDM te VAS modula. 5
![Slika 2.2: Prikaz blokova vizije [4] Slika 2.](/docs-images/100/147311283/images/11-0.jpg "3 prikazuje hijerarhiju vizijske aplikacije, podjelu pojedinog")

11 Slika 2.2: Prikaz blokova vizije [4] Slika 2.3 prikazuje hijerarhiju vizijske aplikacije, podjelu pojedinog modula i upravljačkog programa te isto tako dodatnih alata koji dolaze u paketu s navedenima modulima. Slika 2.3: Hijerarhija vizijske aplikacije [5] 6

12 3. VIZIJSKI SUSTAV Vizijski sustav čine mnogi elementi od kojih je najvažniji kamera. No vizijski sustav sam po sebi može biti sačinjen od još mnogo elemenata kao što su: osvjetljenje, izolirana okolina, parametri kamere. U narednom poglavlju opisani su elementi koji čine vizijski sustav te važnost i težina tih istih elemenata. 3.1 Web kamera Sastavni dio vizijskog sustava je naravno kamera. Kao glavni senzor koristi se web kamera koja u svakodnevici služi za fotografiranje i video pozive. Kamera koja se koristi marke je Logitech c525 s kvalitetom fotografije 8 MP, standardne tehnologije leće te auto fokusom. Upravljački program NI-IMAQdx povezuje kameru s LabVIEW programskim alatom. Slika 3.1: Kamera sustava Digitalna fotografija koja se dohvati kamerom je zapravo dvodimenzionalni niz podataka čije vrijednosti predstavljaju intenzitet svijetlosti. Digitalna fotografija može 7
,a x i y predstavljaju elemente slike koji su raspoređeni kao x redaka i y stupaca. Srce kamere je senzor kamere.")
13 se prikazati jednostavnom funkcijom dviju varijabli f(x, y). Gdje je f intenzitet svjetline u točci s koordinatama (x, y),a x i y predstavljaju elemente slike koji su raspoređeni kao x redaka i y stupaca. Srce kamere je senzor kamere. Senzor kamere je Solid-state uređaj koji prikuplja svijetlost potrebnu za formiranje slike. Senzor kamere je zapravo integrirani sustav s hrpom foto detektora i pojačalom signala, a jedan takav primjer CMOS senzora prikazan je na slici 3.2. Slika 3.2: CMOS senzor[6] U procesu pretvorbe stvarne slike u digitalnu sliku mjeri se intenzitet svjetla na svakom pikselu te se pretvara u cijeli broj. Prikupljena slika sa senzora je slika sivih tonova. Korištenjem Bayerovog filtera koji se nalazi na senzoru dobiva se slika u boji. Upravo Bayerovim filterom dobiva se RGB (red, green, blue) format slike koji u LabVIEW programskom alatu zauzima memoriju od 32 bita. RGB je standardni format prikaza slike i u ovom slučaju slika se sastoji od tri ravnine koje skupa čine jednu sliku u boji. 8
 vidljivo područje kamere. Ovo je područje koje senzor kamere može prikupiti. Radna udaljenost (WD) udaljenost od predmeta do leće.")
14 3.2 Temeljni parametri vizijskog sustava Sljedeći parametri su najosnovniji parametri vizijskog sustava te će biti detaljnije opisani i prikazani u nastavku. Polje pogleda (FOV) vidljivo područje kamere. Ovo je područje koje senzor kamere može prikupiti. Radna udaljenost (WD) udaljenost od predmeta do leće. Razlučivost broj piksela od kojih je sastavljena slika. Njom se definira mogućnost razlikovanja i razaznavanja sitnih detalja na slici. Razlučivošću se također opisuje kakvoća slike. Dubina polja (DOF) DOF leće je mogućnost zadržavanja željene kvalitete slike bez ponovnog fokusiranja ako se predmet inspekcije nalazi bliže ili dalje od najbolje točke fokusa. Veličina senzora kamere veličina aktivnog područja senzora kamere, tipično je specificirana kao horizontalna dimenzija senzora. Osnovni parametri kamere i vizijskog sustava prikazani su na slici 3.3. Slika 3.3: Parametri vizijskog sustava [7] 9


15 Parametar koji definira kameru je razlučivost. Razlučivost je mogućnosti vizijskog sustava da reproducira male detalje objekta koji je pred vidnim poljem kamere. Na razlučivost utječu faktori kao što su tip osvjetljenja, veličina piksela senzora kamere te mogućnosti leće. Što su detalji na objektu manji to je potrebna što veća razlučivost. Na slici 3.4 je prikazan primjer granica razlučivosti kamere. Linijski par je jedna linija sačinjena od jedne crne i jedne bijele linije kako je na slici prikazano. Linijski parovi su zapravo crni pravokutnici na bijeloj podlozi koji se nalaze na malom razmaku. Ako je razmak između pravokutnika mali kao na slici 3.4 a) senzor kamere neće prepoznati sliku kao dva različita pravokutnika. Na zadanoj razlučivosti mogućnost razlikovanja linijskog para kao dva pravokutnika ovisiti će o kontrastu odnosno o razlici sivih tonova. Kontrast opisuje koliko kvalitetno se u ovom slučaju crni pravokutnik razlikuje od bijelog za zadanu razlučivost. Što je veća razlika u intenzitetu između bijelog i crnog pravokutnika to je kontrast bolji. Senzor Senzor Pikseli Leća a) b) Objekt Linijski par Slika 3.4: Granice razlučivosti kamere [8] Točnost mjerenja vizijskog sustava biti će izražena najmanjom značajkom koju sustav može jasno prikazati. Tablica 3.1 prikazuje jedne od temeljnih parametara vizijskog sustava i njihove mjerne jedinice. 10
16 Tablica 3.1: Parametri vizijskog sustava Naziv Oznaka Mjerna jedinica Rezolucija kamere Rc Piksel Prostorna rezolucija Rs mm/piksel Polje pogleda FOV mm Veličina najmanje značajke Sf mm Broj piksela najmanje Nf piksel značajke Radna udaljenost Wd mm 11
17 3.3 Osvjetljenje vizijskog sustava Koliko je važno osvjetljenje vizijskog sustava? Kako bi se poboljšala kvaliteta vizijskog sustava nije uvijek potrebno uložiti u kameru bolje razlučivosti ili kameru s boljom lećom. Kvalitetno i točno postavljeno osvjetljenje je od iznimne važnosti za sustav, a nepravilno osvjetljenje može prouzročiti mnoge probleme pri inspekciji i obradi slike. Odabir osvjetljenja vizijskog sustava nije strogo propisan nego je spoj teorijskog znanja i empirijskih zaključaka. Značajke na slici moraju biti prikazane što jasnije. Svako poboljšanje rasvjete će povećati performanse vizijskog sustava te izraziti pouzdanost sustava. Osvjetljenje se mora prilagoditi objektu inspekcije. Treba voditi računa od kojeg materijala je objekt sačinjen i kakve je teksture. Predmet sačinjen od plastike i predmet sačinjen od drveta drugačije će reflektirati svjetlost te se koristi drugačiji tip osvjetljenja za te predmete. Slika 3.5 prikazuje utjecaj dva tipa osvjetljenja i kontrast predmeta i pozadine. U lijevom stupcu slika predmeti su postavljeni na crnu no reflektivnu površinu, a u desnom stupcu predmeti su postavljeni na bijelu manje reflektivnu površinu. Prstenasto osvjetljenje spada u direktno osvjetljenje te se zrake svjetlosti nalaze na istoj osi kao i leća kamere. Ovim osvjetljenjem mogu se ukloniti sjene koje uvode smetnje na slici ali se i prilikom osvjetljena reflektivne pozadine može pojaviti odsjaj koji dodatno pogoršava čitanje informacija sa slike. Utjecaj ovog osvjetljenja na dvije različite pozadine može se vidjeti na slici 3.5 a). Bočno osvjetljenje koristi se kada se želi izraziti topografija predmeta. Ovakvo osvjetljenje koristi se kod identifikacije mana i nedostataka kod predmeta. Mana ovog osvjetljenja su sjene koje se javljaju baš zbog kuta pod kojim se obasjavaju predmeti. Slika 3.5 b) na crnoj pozadini prikazuje jasno ocrtanu konturu eliptičnog predmeta dok slika na bijeloj pozadini prikazuje manu ovog osvjetljenja, a to su sjene. Slika 3.5 c) prikazuje predmete bez osvjetljenja. Slika predmeta na crnoj i bijeloj pozadini daje jasnu predodžbu važnosti kontrasta u vizijskom sustavu. Zbog činjenice da će se vizijski sustavi koristiti za inspekciju raznih tipova predmeta koji će se razlikovati po obliku, materijalu, boji, teksturi postoje razni tipovi osvjetljenja koji su prilagođeni pojedinim predmetima i daljoj analizi slike. 12
 Prstenasto")
18 Slika 3.5: Utjecaj osvjetljenja i kontrasta a) Prstenasto osvjetljenje b) Bočno osvjetljenje c) Bez osvjetljenja 13

19 Tipovi osvjetljenja mogu se podijeliti na dva tipa osvjetljenja. Osvjetljenje tamnog polja te osvjetljenje svijetlog polja. Osvjetljenje svijetlog polja naziva se tako jer se nalazi u području u kojem osvjetljuje predmet na način da se raspršene zrake svjetla odbijaju u leću. Zbog prikupljanja viška zraka svjetlosti dolazi do odsjaja i gubljenja željenih informacija sa slike. No unatoč mani odsjaja ovim tipom osvjetljenja se postiže dobar kontrast predmeta i pozadine. Osvjetljenje tamnog polja nalazi se u području u kojem je prikupljanje raspršenih zraka svjetlosti znatno manje. Slika 3.6 dodatno objašnjava razliku između ova dva osvjetljenja. Slika 3.6: W polje osvjetljenja [9] Na slici 3.6 je zamišljeno slovo W koje ograničava dva polja osvjetljenja. Zrake koje čine polje pogleda kamere zrcalno su preslikane prema van. Kako ljudsko oko vidi boje u rasponu između približno 400 nm do 700 nm valne duljine tako i osvjetljenje predmeta različitim spektrom svjetlosti može kako poboljšati tako i sniziti kvalitetu vizijskog sustava. Vizijski sustavi su kompleksni sustavi za koje je potrebno uskladiti dovoljno praktičnog znanja s teorijom optike i računalne obrade slike. Ključni faktori kvalitetnog osvjetljenja su smjer osvjetljenja, spektar svjetlosti, tip osvjetljenja. 14
20 4. KALIBRACIJA KAMERE Prije početka akvizicije i obrade slike potrebno je sustav pravilno podesiti odnosno kalibrirati. Zbog nesavršenosti proizvodnog procesa leće javljaju se distorzijske greške koje je potrebno ispraviti kalibracijom. Kalibracijom se pokušavaju popraviti perspektivne greške i distorzija leće. Perspektivne greške javljaju se zbog lošeg položaja kamere u odnosu na predmet koji se promatra. Ako je moguće, greške loše percepcije mogu se izbjeći postavljanjem osi kamere okomito na promatrani predmet. Nekada nije moguće postaviti os kamere okomito na promatrani predmet pa se stoga vrši kalibracija kako bi se kompenzirale nastale greške. Slika 4.1 b) prikazuje perspektivnu grešku kamere uzrokovanu postavljenjem kamere pod kutom u odnosu na promatranu ravninu. a) b) c) Slika 4.1: Perspektivne i distorzijske greške [10] Slika 4.1 a) predstavlja polje točaka bez grešaka, a slika 4.1 c) pokazuje grešku distorzije. Nelinearna distorzija je geometrijsko odstupanje prouzročeno optičkim greškama u samoj leći. Kod tipične kamere javlja se radijalna distorzija. Radijalna distorzija prikazuje točke na rubu polja pogleda udaljenijima nego što one zapravo jesu u stvarnom svijetu. Radijalna distorzija je upravo prikazana na slici 4.1 c). Iako je distorzija prisutna informacije sa slike nisu nužno izgubljene. Kada su potrebna točna mjerenja u jedinicama kao što su milimetri ili centimetri i kada želimo ispraviti grešku distorzije koristi se prostorna kalibracija. Slika sadrži informacije u formi piksela. Prostorna kalibracija dopušta konverziju piksela u mjeru stvarnog svijet kao na primjer mjeru milimetra. Kako bi kalibracija bila uspješna potrebno je definirati poznati set točaka kako bi se uspostavila poveznica između točaka na slici i točaka u stvarnom svijetu. Kalibracijski alati koriste poznate dx i dy udaljenosti stvarnog svijeta među točkama kako bi izračunali točnu 15
21 konverziju između piksela i mjere milimetara u stvarnosti. Slika 4.2 a) pokazuje sliku polja točaka u stvarnom svijetu i sliku 4.2 b) koja je nastala zbog grešaka percepcije. a) b) Slika 4.2: Proces kalibracije [10] LabVIEW nudi dodatno sučelje koje služi za kalibraciju kamere, a naziva se Vision calibration training. Unutar ovog sučelja potrebno je odabrati željeni tip kalibracije i odabrati slike prikupljene kalibracijske mreže. Tijekom kalibracije koristila se točkasta mreža s 20 x 20 točaka koje su međusobno udaljene 10 mm te im je promjer 4 mm. Proces kalibracije odvija se prikupljanjem slika kalibracijske mreže. Pri tome procesu mora se prikupiti što više slika kalibracijske mreže s raznim orijentacijama i pozicijama mreže. Zbog toga razloga kalibracijska mreža je isprintana i zalijepljena na karton kako bi se lakše njome manipuliralo. LabVIEW pruža nekoliko modela kalibracije a to su: Kalibracija točke i udaljenosti, kalibracija koordinata nekoliko točaka, model distorzije, model kamere te kalibracija zakrivljenih objekata. Slika 4.3 prikazuje tipove kalibracije. a) b) c) d) e) Slika 4.3: Tipovi kalibracije 16




22 Model koji će se koristiti prilikom kalibracije sustava je model kamere. Model kamere izračunava osnovne parametre kamere te rješava grešku distorzije i perspektivne greške. Koristi se u aplikacijama pozicioniranja robotskih manipulatora gdje je potrebno odrediti poziciju kamere u odnosu na radno područje manipulatora. Kalibracija kamere odvija se u sedam koraka. Prvi korak je odabir željenog tipa kalibracije. Drugi korak je odabir slika kalibracijske mreže. Kalibracijska mreža mora se slikati u više pozicija i orijentacija kako bi proces kalibracije bio točniji. Na slici 4.4 prikazano je nekoliko slika kalibracijske mreže. Slika 4.4: Orijentacije kalibracijske mreže Treći korak je segmentacija slike kalibracijske mreže kako bi se crne točke mogle prikazati jednostavnije i točnije. Bitna napomena je da slika mora biti slika sivih tonova odnosno 8 bitna slika s vrijednostima piksela od 0 do 255 kako bi se metodom praga slika segmentirala. Četvrti korak kalibracije je pridodavanje broja piksela stvarnim duljinama odnosno pridodavanje broja piksela udaljenosti od 10 mm između točaka u stvarnom svijetu. Peti i šesti korak su izračun distorzije i unutarnjih parametara kamere te pridodavanje koordinatnog sustava. Po završetku kalibracije spremaju se informacije kalibracije kao slika PNG formata koja se kasnije može učitati prilikom akvizicije slike. Tako se ispravljaju greške kamere i alociraju pikseli stvarnim duljinama. Slika 4.5 prikazuju ispravak distorzije leće kamere. 17

23 Slika 4.5: Ispravak distorzije Ako bi se promijenili parametri sustava informacije kalibracije nisu valjane te se kalibracija mora ponoviti za nove parametre sustava. 18

24 5. AKVIZICIJA SLIKE Nakon što je sustav uspostavljen odnosno kada je kamera priključena na računalo i kada su uvjeti osvjetljenja prihvatljivi može se krenuti na prikupljanje slike. Pošto se želi osigurati obrada slike u stvarnom vremenu koristi će se While petlja s pripadajućim blokovima za inicijalizaciju kamere, konfiguraciju akvizicije slike i bloka za kopiranje zadnje slike s buffera. Slika 5.1 prikazuje kod koji kontinuirano prihvaća sliku i učitava kalibriranu sliku sustava. Slika 5.1: Kod akvizicije IMAQdx Open Camera otvara odabranu kameru i stvara poveznicu s kamerom. Blok se nalazi izvan While petlje jer je poveznicu s kamerom potrebno konfigurirati samo jednom. Nakon što je kamera otvorena IMAQdx Configure Grab konfigurira i započinje kontinuiranu akviziciju slike koja se neprestano vrti na bufferu. IMAQdx Grab blok kopira najnoviju sliku s buffera. Slika koja se prikupi ovim blokom reprezentira se RGB sustavom boje. Gornji red blokova odnosi se na korigiranje prikupljene slike. Informacije kalibracije koje su zadane datotekom iz prethodnog poglavlja otvaraju se u obliku PNG datoteke zvane InformacijeKalibracije.png. Datoteka se učitava u blok IMAQ Set Calibration Info zajedno s trenutnom slikom kamere. Blok postavlja infromacije kalibracije te se izlazne informacije tog bloka spajaju na blok IMAQ Correct Calibrated Image koji korigira trenutnu sliku prema modelu kalibracije odabranom u prethodnom poglavlju. Nakon završetka akvizicije poveznica s kamerom se prekida blokom IMAQdx Close Camera te se blokom IMAQ Dispose brišu slike i oslobađa memorija koja je zauzeta blokom IMAQ Create. 19
25 6. OBRADA SLIKE Digitalna obrada slike je disciplina u kojoj je ulaz i izlaz nekog procesa slika. Obrada slike može se definirati kao proces koji iz slike izvlači neku informaciju u svrhu razumijevanja slike. Slika se na računalu obrađuje iz više razloga. Prvi razlog je poboljšanje vizualne kvalitete prikaza slike samom čovjeku. Drugi je priprema slike za analizu, mjerenje i izvlačenje informacija iz slike za daljnju inspekciju. Procesi obrade slike će se razlikovati na osnovu algoritama koji se koriste prilikom obrade. Osnovne operacije koje se koriste za obradu slike su: Operacije nad histogramima Prostorno filtriranje Frekvencijsko filtriranje Morfološke operacije U ovom radu koristile su se operacije prostornog filtriranja i morfološke operacije. U sljedećim poglavljima prikazani su sustavi reprezentacije boje od kojih su prilikom obrade slike najkorišteniji RGB i HSL sustavi. U narednim potpoglavljima praktično je prikazano prostorno filtriranje i morfološke operacije koje služe za poboljšanje slike. 20
26 6.1 Sustavi reprezentacije boje Svjetlost se u čovjekovu oku fokusira na mrežnicu oka u kojoj se nalaze dvije vrste stanica tako zvani štapići i čunjići. Čunjići su stanice odgovorne za čovjekovu reprezentaciju boje. Postoje tri vrste čunjića, a to su osjetljivi na crvenu, zelenu i plavu svjetlost. Sustav reprezentacije boje koji najlakše opisuje čovjekov vid je RGB sustav (Red-Green-Blue) baš zbog toga što koristi kombinaciju tri parametra za opis boje kao i čunjići u čovjekovom oku. No čovjekov se vid može bolje opisati HSL (Hue-Saturation-Luminance) sustavom jer parametri kao što su nijansa boje, zasićenje boje i intenzitet svjetlosti vjerodostojnije opisuju čovjekov vid. Ovisno o namjeni i industriji u kojoj se boja prikazuje postoji nekoliko sustava reprezentacije boje, a to su: RGB sustav baziran na crvenoj, zelenoj i plavoj. Koriste ga ponajviše računala za prikaz slike. HSL sustav baziran na nijansi, zasićenju i intenzitetu svjetlosti koristi se u aplikacijama obrade slike. CIE sustav kojeg je definirala svjetska organizacija CIE (International Commission on Illumination)kao različiti osjećaj boje koju mozak percipira. CMY sustav korišten u tiskarskoj industriji, a koristi cijan, magenta i žutu boju. YIQ sustav odvaja informacije intenziteta svjetlosti od informacije boje. Korišten za TV emitiranje. [10] Pri svakoj obradi slike potrebno je definirati sustav reprezentacije slike. NI Vision podržava RGB i HSL sustav slike i specificiraju se svaki put kada se slika kreira blokom IMAQ Create. Ovaj blok priprema memorijsku lokaciju koju će slika zauzeti. Slika 6.1: IMAQ Create 21
27 Ako se očekuje da se uvjeti osvjetljenja znatno mijenjaju tijekom prikupljanja slike bolje je koristiti HSL sustav. HSL sustav daje točnije informacije naspram RGB sustava prilikom korištenja funkcija za procesiranje slike kao što su podudaranja uzorka boja, uspoređivanja boja i lociranja boje. U RGB sustavu tri glavne komponente boja mogu se kombinirati kako bi se reproducirale gotovo sve ostale moguće boje. RGB sustav može se vizualizirati kao trodimenzionalna kocka s crvenom, zelenom i plavom na osima koordinatnog sustava kao što je prikazano na slici 6.2. Crna je u ishodištu sustava dok je bijela u nasuprotnom kutu kocke. Svaki brid kocke ima vrijednost od nula do jedan. Kako se vrijednost boje udaljuje od ishodišta tako se povećava i zasićenje te komponente. Svaka boja je u ovom sustavu defnirana s tri točke (R, G, B) ili tri komponente boje. Slika 6.2: RGB sustav [10] HSL sustav boje razvijen je kako bi čovjek lakše pojmio boju. Nijansa, zasićenje i intenzitet svjetlosti su karakteristike kojima se razlikuju boje u HSL sustavu. Nijansa odgovara dominantnoj valnoj duljini svjetlosti boje. Nijansa je zapravo razlika između boja. Raspon nijanse se može predočiti kao dugine boje. Zasićenje se odnosi na količinu bijele dodane nijansi i predstavlja relativnu čistoću boje. Boja koja nema ni malo dodane bijele je potpuno zasićena. Boje kao što su roza, boja lavande slabije su zasićene za 22

28 razliku od crvene i ljubičaste. Kromatičnost je kombinacija nijanse i zasićenja, a veza između kromatičnosti i intenziteta svjetla karakterizira boju. HSL sustav boje je cilindričan i može se prikazati slikom 6.3. Vrijednosti nijanse kreću se od nula do 360º, zasićenje se kreće u rasponu od nula do jedan, gdje jedinica predstavlja najčišću boju. Intenzitet svjetlosti također pokriva raspon od nule do jedince gdje je nula crna a jedan bijela boja. Ukratko rečeno veza između kromatičnosti i ljudske predodžbe boje čine HSL sustav pogodnim za razvijanje vizijskih aplikacija. Slika 6.3: HSL sustav boje[10] 23
29 6.2 Prostorno filtriranje Prostorno filtriranje je operacija kod koje izlazna vrijednost piksela ovisi o ulaznim vrijednostima susjedstva piksela pod obradom. Osnovna ideja prostornog filtriranja je provlačenje prozora ili maske određenih dimenzija ulaznom slikom. Prostorno filtriranje dijeli se na linearno i ne linearno filtriranje. Linearno filtriranje ili konvolucija izvodi se direktno na susjednim pikselima odabrane točke (x, y) i koeficijentima prozora. Konvolucijsko filtriranje slike f veličine MxN s prozorom filtra m x n može se prikazati izrazom s 6.1. g(x,y) = a. b s= a t= b w(s, t)f(x + s, y + t) (6.1)[11] Kako bi se filtrirala cijela slika jednadžba mora proći kroz sve elemente slike odnosno piksele. U navedenoj jednadžbi g(x, y) je izlazna slika, f(x, y) ulazna, w(s, t) je prozor dok su a i b brojevi iz skupa prirodnih brojeva. Slika 6.4 prikazuje 3x3 prozor koji putuje po slici f(x, y). Prozor je osjenčan, a piksel koji se trenutno filtrira zatamnjen je. Iz slike se može zaključiti da će piksel nad kojim se vrši konvolucija 3x3 prozorom imati osam susjednih piksela. Ovo ne vrijedi samo za piksele koji se nalaze na rubu slike. w(t,s) f(x,y) Slika 6.4: Prikaz prozora filtra u radu 24
30 Slika 6.5 predstavlja princip rada prostornog filtriranja. Slika 6.5: Princip rada prostornog filtera Zamislimo da se prostorno filtrira slika 3x3 prozorom 3x3. Vrijednosti koeficijenata prozora neka budu jednake jedinici. Prozor će središnjim koeficijentom proći kroz svaku vrijednost slike f(x, y). Kada prozor bude iznad vrijednosti piksela, vrijednosti susjednih piksela uključujući i središnji piksel pomnožiti će se vrijednostima prozora, a zatim će se suma umnožaka podijeliti ukupnim bojem koeficijenata prozora što je u ovom slučaju devet. Vrijednost koja se dobije ovim postupkom upisuje se kao nova vrijednost elementa izlazne slike. Kada se prozor nalazi na rubovima slike koeficijenti prozora množe se nulom jer se ne nalaze iznad vrijednosti piksela. Nelinearno filtriranje također se zasniva na operaciji nad susjednim pikselima jedina razlika je to što se kod nelinearnih filtera ne sumiraju umnošci koeficijenta slike i koeficijenata prozora nego se koriste nelinearne operacije nad susjedstvom. Tablica 6.1 sadrži vrste filtera i njihovu namjenu. 25
31 Tablica 6.1: Vrste prostornih filtera Tip Filter Namjena Linearni Visoko propusni Gradient, Laplace Izoštravanje, naglašavanje rubova Nisko propusni Smoothing, Gausov Zaglađivanje, uklanjanje šumova Nelinearni Visoko propusni Gradient, Roberts, Sobel, Prewitt, Diferencialni, Sigma Izoštravanje, naglašavanje rubova Nisko propusni Medijan, filter n-tog reda Zaglađivanje, uklanjanje šumova VDM modul sadrži već zadane filtere kao što su Cany Edge detection filter koji je specijaliziran za detekciju rubova čak i pod utjecajem šuma i smetnji. Zatim unutar bloka Edge detection nalazi se nekoliko filtera za izvlačenje kontura ovisno o njihovom temeljnom prozoru a to su: Diferencijal, Gradient, Prewitt, Roberts, Sigma i Sobel. Osim zadanih filtera korisnik može kreirati vlastite linearne filtere što omogućuje blok IMAQ Convolute. IMAQ Convolute tako nudi mogućnost obrade slike prilagođenim filterima kreiranim po potrebi korisnika. U nastavku će biti prikazane slike filtrirane nisko propusnim Smoothing filterom. Linearni filtri kreiraju se blokom IMAQ Convolute. Veličina prozora nema teoretsku granicu te prozor može biti kvadratni i pravokutni. Neke od osnovnih veličina prozora filtera su 3x3, 5x5, 5x7, 9x3, 127x127 i tako dalje. Vrijednosti koeficijenata prozora definiraju kako će se slika filtrirati. Ako prozor sadrži negativne i pozitivne koeficijente filter će biti visoko propusni odnosno filter će naglašavati rubove i izoštravati sliku. Ako prozor sadrži sve pozitivne koeficijente slika će se izgladiti i eliminirati šumove. Slika 6.6 prikazuje djelovanje Smoothing filtera s dvije dimenzije prozora filtera. 26
 Original slika")
32 Slika 6.6: Nisko propusni filter a) Original slika b) Smoothing 7x7 c) Smoothing 15x15 27

33 Slika 6.7: Kreiranje filtera Slika 6.7 prikazuje kako se stvara prostorni filtar 15x15. Prilikom kreiranja prozora filtera većeg od 7x7 potrebno je povećati granicu slike s blokom IMAQ Image border size. Donji blok je IMAQ Build kernel koji na ulaz prima string elemenata prozora i prosljeđuje ih kao 2D niz u blok IMAQ Convolute. Izlaz bloka IMAQ Convolute je filtrirana slika. Slika je filtrirana iz razloga kako bi se granice predmeta zagladile. Zaglađena slika će omogućiti lakšu segmentaciju predmeta i pozadine. 28
34 6.3 Metoda praga Metoda praga je segmentiranje slike na dva područja, područje čestica i područje pozadine [10]. To se radi na način da se određeni raspon vrijednosti piksela sive slike postave u vrijednost jedinice, a ostatak piksela postavi se u nulu. Raspon kojim se postavljaju vrijednosti piksela naziva se granica praga. Slika 6.8: Blok metode praga Blok metode praga na ulazu prima sliku sivih tonova. Slika sivih tonova je 8 bitna slika čije vrijednosti piksela sežu od 0 do 255. Izlaz bloka je binarna slika s vrijednostima piksela 0 ili 1. Na ovaj način mogu se segmentirati željeni predmeti i fokusirati se na daljnju obradu tih istih predmeta. Osim bloka koji na ulaz prima sliku sivih tonova postoji i blok koji prima sliku u boji. Blok se zove IMAQ Color threshold. Kako slika u boji sadrži tri komponente na primjer crvenu, zelenu, plavu ili u slučaju HSL sustava nijansu, zasićenje i svjetlinu prilikom kreiranja binarne slike potrebno je definirati tri granice na ulazu bloka. Vrijedi ista analogija, ako piksel slike pripada zadanom intervalu na izlazu bloka taj piksel biti će postavljen u vrijednost jedinice. Slika 6.9 prikazuje blok IMAQ Color threshold. Na slici 6.10 slika a), b) i c) snimljene su s prstenastim osvjetljenjem no slika d) je snimljena bez toga osvjetljenja. Pozadinsko osvjetljenje sobe u kojoj je postavljena mala platforma vizijskog sustava uzrokovalo je bacanje sjene predmeta. Kako je metoda praga pretvaranje slike sivih tonova u binarnu sliku vidljivo je da metoda praga mnogo ovisi o osvjetljenju te da sjene prikazuju predmete koji zapravo nisu ispred kamere. Slika b) je procesirana s granicom praga od 0 do 70, a slika c) s granicom od 0 do 110. Slika d) procesirana je s istom granicom kao i slika c). 29


35 Slika 6.9: IMAQ Color threshold Slika 6.10: Granice metode praga i utjecaj osvjetljenja 30
36 6.5 Morfološke operacije Morfološke operacije mijenjaju strukturu čestica binarne slike [10]. Morfološke operacije koriste se kada se želi poboljšati binarna slika prije same analize, mjerenja čestice i identifikacije. Česticom se smatra skupina piksela vrijednosti jedinice. Ponekad binarna slika sadrži nepoželjne informacije kao što su čestice šuma, čestice nejednolikih granica, čestice koje dodiruju granicu slike te dodirivanje drugih čestica što rezultira stapanjem više čestica u jednu veliku. Utjecajem morfoloških operacija na oblik čestica neželjene informacije mogu se ukloniti. Morfološke operacije obrađuju piksele na osnovu njihovog susjedstva kao i prostorni filteri. Razlika između prostornog filtriranja i morfoloških operacija je u tome što prilikom morfoloških operacija elementi prozora filtera su ili nula ili jedan kao i slika koja se obrađuje. Tri su glavne operacije morfologije, a to su erozija, dilatacija i hit and miss operacija. Sve ostale morfološke operacije kombinacija su ove tri. Slika 6.11: Morfološke operacije Kao što je navedeno u uvodu ovog poglavlja javljaju se smetnje u binarnoj slici. Prvi blok IMAQ Reject border slike 6.11 eliminira čestice koje dotiču granice slike odnosno čestice koje dodiruju granicu biti će vrijednosti nula. IMAQ Remove particle je blok kojim se erodira binarna slika. Erozija je funkcija koja eliminira smetnje u pozadini i smanjuje konturu čestice. Zamislimo da je prozor filtera kojim se vrši erozija veličine 3x3 s elementima prikazanim matricom
![0 1 0 [ 1 0 1 0 1 0 ] (6.2) Središnji piksel slike koji je pod obradom prozora filtera neka se zove P0. Susjedni pikseli slike koji su maskirani jedinicama prozora neka se zovu Pi.](/docs-images/100/147311283/images/37-0.jpg "Ako je vrijednost bilo kojeg od Pi piksela jednaka nuli P0 postavlja se u nulu. U suprotnom P0 sadrži vrijednost jedinice.")
37 0 1 0 [ ] (6.2) Središnji piksel slike koji je pod obradom prozora filtera neka se zove P0. Susjedni pikseli slike koji su maskirani jedinicama prozora neka se zovu Pi. Ako je vrijednost bilo kojeg od Pi piksela jednaka nuli P0 postavlja se u nulu. U suprotnom P0 sadrži vrijednost jedinice. To znači da svi susjedni pikseli Pi moraju imati vrijednost jedince kako bi se središnjem pikselu pridodala vrijednost jedinice. Dilatacija je suprotna operacija od erozije koja eliminira šupljine unutar čestica i širi konture čestice na osnovu zadanog prozora. Pa tako rečeno ako je vrijednost bilo kojeg od Pi piksela jednaka jedinici P0 postavlja se u jedinicu [10]. Slika 6.12 prikazuje binarnu sliku na početnu te rezultate erozije i dilatacije procesirane s prozorom iz relacije 6.2. Slika 6.12: Operacije morfologije a) Ulazna slika b) Erozija c) Dilatacija 32
38 Blok IMAQ Morphology nudi opciju odabira morfoloških operacija i broja ponavljanja te operacije. Posljednji blok sa slike 6.11 koristi se na kraju kako bi jedinicama zapunio čestice koje unutar svoje konture sadrže sitne rupe. Na posljetku blok rezultira česticom ujednačenih vrijednosti unutar konture te poboljšava samu konturu čestice. Hit and miss funkcija pronalazi određenu konfiguraciju piksela koja je određena prozorom filtera. Što znači ako je konfiguracija piksela sa slike ista kao prozor filtera funkcije središnji piksel će imati vrijednost jedinice bez obzira dali je prije toga bio u jedinici ili u nuli. Kada bi se blokom IMAQ Morphology sa slike 6.11 odabrala operacija dilatacije na izlazu tog bloka mogla bi se prepoznati još jedna morfološka operacija. Sklop dva uzastopna bloka IMAQ Remove particles i IMAQ Morphology čine morfološku operaciju otvaranja (Opening). Funkcija Opening je erozija popraćena dilatacijom. Ova funkcija eliminira sitne čestice u pozadini i zaglađuje granice čestica. Kada bi obrnuli redoslijed erozije i dilatacije dobili bi operaciju zatvaranja (Closing) koja zapunjuje male pukotine unutar čestica i zaglađuje granice čestice. Slika 6.13 prikazuje međukorake morfoloških operacija sa slike U prikazanim međukoracima može se zaključiti kako je morfološkim operacijama moguće izolirati ne samo čestice nego i pojedine detalje čestica. Promotre li se slike c) i e) jasno jevidljiva zadaća funkcije Closing koja je uklonila zaostale čestice predmeta koji je dodirivao granicu slike te je podebljala konture ostalih čestica. 33
 Siva slika b) Ulazna binarna")
39 Slika 6.13: Međukoraci morfoloških operacija a) Siva slika b) Ulazna binarna slika c) Reject border d) Erozija e) Dilatacija f) Fill hole 34
40 7. MACHINE VISION U prethodnim poglavljima detaljno su objašnjeni parametri vizijskog sustava te izdvojeni koraci obrade slike koji se koriste u praksi. U sklopu ovog poglavlja prikazuje se razvoj aplikacije za detekciju objekata prema obliku te prema boji. Na slici 7.1. prikazan je dijagram razvoja aplikacije odnosno kompletnog vizijskog sustava. Nakon postavljanja vizijskog sustav te kalibracije, slijedi akvizicija slike. Smjer dalje obrade slike biti će uvjetovan informacijom koja se sa slike želi izvući. Filtrirana slika se segmentira nakon čega se detektirani objekti mogu analizirati. Postavaljnje vizijskog sustava Kalibracija sustava Akvizicija slike Pretvorba sustava reprezentacije boje Prikaz slike sivih tonova Obrada slike Prostorno filtriranje Analiza čestica Segmentacija slike Morfološke operacije Prikaz rezultata Slika 7.1: Dijagram izrade vizijske aplikacije 35
41 7.1 Prepoznavanje oblika Programski kod se prikazuje u nekoliko odvojenih slika. Prva slika prikazuje blokove akvizicije slike i blokove zaslužne za manipulaciju slikom. Slijedeća slika prikazat će blokove obrade slike. Posljednja slika prikazuje dio koda zaslužan za analizu i prepoznavanje oblika. Slika 7.2: Akvizicija slike Na slici su prikazana tri bloka koji manipuliraju slikom. IMAQ Extract ograničava područje slike koje želimo prikazati. Ovim blokom se može ograničiti područje slike koje želimo prikazati i obraditi. Kako blok IMAQdx Grab na izlazu vraća 32 bitnu RGB sliku blokom IMAQ Cast Image promijeniti ćemo sustav reprezentacije slike u HSL jer je pogodniji za obradu slike. 36

42 Slika 7.3: Obrada slike Blokovi sa slike 7.3 opisani su u prethodnom poglavlju obrada slike unutar potpoglavlja prostorno filtriranje, metoda praga i morfološke operacije. Slika 7.4: IMAQ Particle Analysis 37
43 Programski kod na slici 7.4 zaslužan je za analizu čestica. Blok na ulazu prima binarnu sliku čestica, a na izlazu vraća broj detektiranih čestica i dvodimenzionalni niz podataka mjerenja nad česticama. Mjerenja koje blok vraća zadana su jednodimenzionalnim nizom sa slike zvanim Pixel Measurements. Prve četiri mjere odnose se na koordinate piksela čestice i te koordinate koristiti će se za ocrtavanje kvadrata oko pronađene čestice. Zadnja peta mjera je Hu moment. Hu moment slike zasnovan je na momentima slike. Momenti slike definirani su relacijom 7.1 m pq = x p y q ( x,y)dxdy (7.1)[12] Iz relacije 7.1 funkcija (x,y) je funkcija distribucije gustoće piksela dok su p i q elementi iz skupa cijelih brojeva. Hu moment daje skalarnu vrijednost koja opisuje neki geometrijski oblik. Na osnovu Hu momenta razni geometrijski oblici se mogu klasificirati. Važno je naznačiti da je Hu moment invarijantan na pomak čestice, rotaciju i povećanje čestice. Drugim riječima ako se predmet koji je pod inspekcijom zarotira, translatira ili pak poveća površinom predmet će biti klasificiran kao ista čestica. Koliko čestica se segmentira toliko će redaka 2D niza blok IMAQ Particle Analysis vratiti na izlaz bloka što znači da se redcima može pristupiti blokom Index Array koji za ulazni niz vraća element niza na izlazu. Index Array blok na slici pristupa nultom retku 2D niza. Nakon što je redak iz 2D niza izvučen, posebno se pristupa svakom elementu 1D niza odnosno pristupa se mjerama čestice sa slike koje su određene nizom Pixel Measurements gdje je prvi element niza indeksiran nulom, drugi jedinicom te tako sve do Hu momenta koji je indeksiran četvorkom. Slika 7.5 prikazuje kod koji uspoređuje vrijednosti momenta trenutne čestice na slici i već naučenih predmeta. Ako se vrijednost momenta čestice sa slike nalazi u jednom od intervala usporedbe toj čestici se pridodaje klasifikacija. Slika 7.6 prikazuje klasificirane objekte prema obliku koju su invarijantni na pomak, rotaciju i skaliranje. 38

44 Slika 7.5: Klasifikacija objekata 39

45 Slika 7.6: Ulazna slika i klasificirani objekti 40
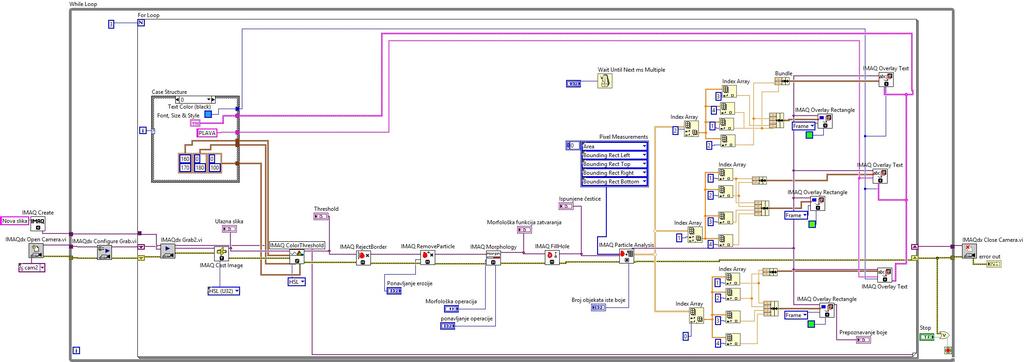
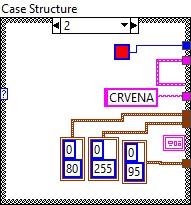
46 7.2 Prepoznavanje boje U potpoglavlju 6.3 opisan je blok IMAQ Color threshold koji sliku u boji koja je sačinjena od tri ravnine piksela pretvara u binarnu sliku. Aplikacija je programirana tako da se razlikuju tri primarne boje crvena, zelena i plava. Kako bi se segmentirali objekti na primjer plave boje moraju se postaviti tri granice praga i spojiti na ulaz bloka IMAQ Color threashold. Granice se postavljaju za tri vrijednosti HSL sustava reprezentacije boje. Tablica 7.1 prikazuje intervale vrijednosti nijanse, zasićenja i svjetline korištene za prikaz tri primarne boje. Intervali korišteni u aplikaciji određeni su metodom pokušaja i praktičnog iskustva. Intervali će biti točni za trenutno korišteni vizijski sustav. Ako bi se parametri vizijskog sustava promijenili tako bi se i intervali granica mijenjali skupa s njima. Tablica 7.1: Intervali granica praga Nijansa Zasićenje Svjetlina Crvena Zelena Plava Nakon što je slika segmentirana prema željenim intervalima na izlazu bloka prikazati će se predmeti čije vrijednosti piksela spadaju u te intervale. Pa tako ako bi se u blok na ulaz primijenili intervali plave boje na izlazu bloka bi se prikazale čestice koje su plave boje. Kako metoda praga neće savršeno prikazati konture segmentiranih čestica potrebno je morfološkim operacijama dodatno poboljšati binarnu sliku i ukloniti eventualne smetnje. Slika 7.7 prikazuje kod aplikacije prepoznavanja boje. Kod se ne razlikuje mnogo od koda iz prethodnog poglavlja o prepoznavanju oblika te su već svi korišteni blokovi do sada opisani. Promjena u kodu koja omogućava segmentaciju tri primarne boje je postavljanje dijela koda u for petlju koja se izvršava tri puta. Unutar for petlje nalazi se Case struktura s tri uvjeta. U svakom od uvjeta postavljeni su intervali granica praga segmentacije za svaku boju. Za plavu boju uvjet izvršavanja Case bloka je vrijednost nule. Mijenjanje tri uvjeta je omogućio iterator for petlje koji kreće od nule i završava u dvojci. Na slici je prikazan blok IMAQ Color threshold s Case strukturom u kojoj se nalaze intervali granice praga. 41

47 Slika 7.7: Kod prepoznavanja boje Ostatak koda su morfološke funkcije i blok IMAQ Particle Analisys pomoću kojeg se pristupa informacijama čestica. Ostatak blokova također se nalazi u for petlji. Slika 7.8 prikazuje ulaznu i izlaznu sliku ove aplikacije. 42
48 Slika 7.8: Prednji dijagram aplikacije 43
49 8. ZAKLJUČAK Strojna vizija ili mnogo popularniji engleski naziv Machine Vision usko je povezana s Machine Learning granom računalne znanosti. Tijekom izrade rada pokušalo se je računalo naučiti logičkom prepoznavanju oblika. Brojna testiranja pokazuju da algoritam daje rezultate ali jedino u uvjetima koji su unaprijed poznati. Machine lerning je grana računalne znanosti koja se bavi samostalnim učenjem računala kognitivnim funkcijama. Suvremena obrada slike (primjerice autonomna vožnja automobila) bazirana je prvenstveno na primjeni neuronskih mreža odnosno umjetne inteligencije (Artificial intelligence (AI)) koja ima sposobnost učenja i adaptacije svim uvjetima. Da bi računalo jasno razumjelo što je prikazano na slici sustav vizije je potrebno kalibrirati, sliku poboljšati, segmentirati i analizirati. Poglavlja rada opisana su kao smjernice za izrade Machine vision aplikacije. Poglavlje o obradi slike opisuje kako se slika može poboljšati prostornim filterima na način koji će pogodovati daljnjoj obradi i analizi slike. Metodom praga uspješno se segmentiraju objekti koji se kasnije klasificiraju. Bez kvalitetnog i ispravno usmjerenog osvjetljenja izlazna slika segmentacije nebi bila kvalitetna i pogodna za izvlačenje informacija sa slike. Tijekom metode praga dolazi do izražaja koliko je bitan kontrast pri inspekciji. Tamniji predmeti na svijetloj pozadini lakše i zornije će biti segmentirani. Ako os kamere nije moguće postaviti okomito na ravninu u kojom se nalaze objekti pod inspekcijom pojaviti će se perspektivne greške. Pojava perspektivnih grešaka ne znači nužno i gubitak informacija. Kalibriranjem modela kamere uklanjaju se ne samo perspektivne greške nego i distorzijske greške kamere. Kada se predmeti sa slike segmentiraju slika postaje binarna. Predmeti inspekcije će poprimiti vrijednost jedinice, a pozadina vrijednost nule. Morfološkim operacijama dodatno se naglašava struktura čestice, uklanjaju neželjene smetnje u pozadini i tako dodatno naglašava oblik segmentirane čestice. Kako bi aplikacije prepoznavanja oblika bila robusnija korišteni su momenti slike. Momenti slike su invarijantni na translaciju, rotaciju i skaliranje objekta inspekcije. Izvlačenjem mjere Hu momenta iz čestice objekti se mogu klasificirati u željene klase. Postupak akvizicije, obrade, segmentacije i analize slike na osnovu Hu momenata čini robustan sustav koji pouzdano u definiranim uvjetima odrađuje sve zadane zadatke. 44
50 9. LITERATURA [1] National Instruments. What is LabVIEW? [Online] Dostupno na: ( ) [2] National Instruments. What are the different colors of connections in LabVIEW? [Online] Dostupno na: ( ) [3] Nationa Instruments. Differences Between NI-IMAQ, NI-IMAQdx, and NI-IMAQ I/O. [Online] Dostupno na: ( ) [4] National Instruments. Where Can I Find the Vision Acquisition Software (VAS) and Vision Development Module (VDM) Functions Palettes in NI LabVIEW? [Online]. ( ) [5] National Instruments. Differences Between NI Vision Acquisition Software, NI Vision Builder, and the NI Vision Development Module [Online] Dostupno na: ( ) [6] Digital photography review.canon is now selling CMOS image sensors, including a 120MP APS-H beast. [Online] Dostuno na: [7] Edmund Optics. Imaging System Parameter.[Online]; Dostupno na: [8]Edmund optics.resolution. [Online] Dostupno na: [9] Omron Microscan system. Bright field and Dark field lighting. [Online] Dostupno na: [10] National Instruments.IMAQ Vision Concepts Manual.[PDF].Lipanj 2003.Dostupno na: 45
51 [11] Songho.Ca. Digital signal procesing:convolution. [Online] Dostupno na: ( ) [12] IRE Transaction on information theory. Visual Pattern Recognition by Moment Invariants, Ming-Kuei Hu Dostupno na: ( ) 46
52 10. OZNAKE I KRATICE VI Virtualni Instrument VDM Vision Development Module NI National Instruments VAS Vision acquisition software IEEE Institute of Electrical and Electronics Engeners RIO Re-Confugurable Input/Output CCD Charged Couple Device CMOS ComplementaryMetal Oxside Semiconductor MyDAQ Data Acqusition device FOV Field of View WD Working distance DOF Depth of field MP Mega piksel 47
53 11. SAŽETAK Naslov: Akvizicija i obrada slike unutar LabVIEW programskog alata Svrha rada je upoznavanje i korištenje modula za akviziciju i obradu slike unutar programskog alata LabVIEW. LabVIEW nudi brzu uspostavu vizijskog sustava VAS i VDM modulima. VDM modul koristi se za obradu slike. Slika se može obrađivati s raznim algoritmima. Algortitmi za prepoznavanje oblika mogu prepoznati definirani predložak, izbrojiti koliko je takvih primjeraka na slici te. Kvalitetu vizijskih sustava osigurava osvjetljenje te postizanje kontrasta između predmeta i pozadine na kojoj se nalazi. Kalibriranjem kamere uklanja se distorzija leće i perspektivne greške. Segmentacijom slike popraćenom morfološkim operacijama izdvajaju se objekti koji se dalje žele analizirati. Momentima slike mogu se opisati i klasificirati geometrijski oblici. Daljnje postavljanje koordinatnog sustava omogućuje unaprjeđenje sustava ka upravljanju manipulatorima u pick and place aplikacijama. Ključne riječi: LabVIEW, Machine Vision, Obrada slike, Momenti slike 48
54 12. ABSTRACT Title:Acquisition and image processing within LabVIEW software The purpose of this work is to familiarize yourself with acquisition and image processingwithin LabVIEW program tool and use the acquisition and image processing module. LabVIEW offers a fast vision system setup with VAS and VDM modules. The VDM module is used for image processing. The image can be processed with various algorithms. Pattern recognition algorithms can recognize an already defined template, count how many such specimens are in the image. The quality of vision systems is measured onsystem illumination and contrast between objects and the background on which it is located. Calibrating the camera removes lens distortion and perspective error. Image segmentation accompanied with morphology functions can distinguish objects for further analisys. With moment invariants geometrical shapes can be clasified and learnd. Further setting of the coordinate system allows the system to be upgraded to manipulate manipulators in pick and place applications. Keywords: LabVIEW, Machine Vision, Image processing, Moments invarinats. 49
55 13. PRILOZI 50
56 51
57 52
58 PREPOZNAVANJE BOJE.vi
59
Postojanost boja
 Korištenje distribucije osvjetljenja za ostvaranje brzih i točnih metode za postojanost boja Nikola Banić 26. rujna 2014. Sadržaj Postojanost boja Ubrzavanje lokalnog podešavanja boja Distribucija najčešćih
Korištenje distribucije osvjetljenja za ostvaranje brzih i točnih metode za postojanost boja Nikola Banić 26. rujna 2014. Sadržaj Postojanost boja Ubrzavanje lokalnog podešavanja boja Distribucija najčešćih
SEMINAR
 1. Cilj vežbe Lekcija 9 Akvizicija i osnovna obrada slike u LabVIEW Cilj vežbe je da studente upozna sa: Akvizicijom slike. Osnovnim koracima pri obradi slike Zadatak 9.1. Povezati USB kameru i kreirati
1. Cilj vežbe Lekcija 9 Akvizicija i osnovna obrada slike u LabVIEW Cilj vežbe je da studente upozna sa: Akvizicijom slike. Osnovnim koracima pri obradi slike Zadatak 9.1. Povezati USB kameru i kreirati
Napredno estimiranje strukture i gibanja kalibriranim parom kamera
 Napredno estimiranje strukture i gibanja kalibriranim parom kamera Ivan Krešo Mentor: Siniša Šegvić 3. srpnja 2013. Motivacija Stereo vid dvije kamere omogućavaju mjerenje dubine korespondentnih točaka
Napredno estimiranje strukture i gibanja kalibriranim parom kamera Ivan Krešo Mentor: Siniša Šegvić 3. srpnja 2013. Motivacija Stereo vid dvije kamere omogućavaju mjerenje dubine korespondentnih točaka
kriteriji ocjenjivanja - informatika 8
 8. razred Nastavne cjeline: 1. Osnove informatike 2. Pohranjivanje multimedijalnih sadržaja, obrada zvuka 3. Baze podataka - MS Access 4. Izrada prezentacije 5. Timska izrada web stranice 6. Kritički odnos
8. razred Nastavne cjeline: 1. Osnove informatike 2. Pohranjivanje multimedijalnih sadržaja, obrada zvuka 3. Baze podataka - MS Access 4. Izrada prezentacije 5. Timska izrada web stranice 6. Kritički odnos
Prikaz slike na monitoru i pisaču
 CRT monitori s katodnom cijevi i LCD monitori na bazi tekućih kristala koji su gotovo istisnuli iz upotrebe prethodno navedene. LED monitori- Light Emitting Diode, zasniva se na elektrodama i diodama koje
CRT monitori s katodnom cijevi i LCD monitori na bazi tekućih kristala koji su gotovo istisnuli iz upotrebe prethodno navedene. LED monitori- Light Emitting Diode, zasniva se na elektrodama i diodama koje
SVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA Seminarski rad u okviru predmeta Računalna forenzika BETTER PORTABLE GRAPHICS FORMAT Matej
 SVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA Seminarski rad u okviru predmeta Računalna forenzika BETTER PORTABLE GRAPHICS FORMAT Matej Crnac Zagreb, siječanj 2018 Sadržaj Uvod 2 BPG format
SVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA Seminarski rad u okviru predmeta Računalna forenzika BETTER PORTABLE GRAPHICS FORMAT Matej Crnac Zagreb, siječanj 2018 Sadržaj Uvod 2 BPG format
Sveučilište J.J. Strossmayera Fizika 2 FERIT Predložak za laboratorijske vježbe Lom i refleksija svjetlosti Cilj vježbe Primjena zakona geometrijske o
 Lom i refleksija svjetlosti Cilj vježbe Primjena zakona geometrijske optike (lom i refleksija svjetlosti). Određivanje žarišne daljine tanke leće Besselovom metodom. Teorijski dio Zrcala i leće su objekti
Lom i refleksija svjetlosti Cilj vježbe Primjena zakona geometrijske optike (lom i refleksija svjetlosti). Određivanje žarišne daljine tanke leće Besselovom metodom. Teorijski dio Zrcala i leće su objekti
Microsoft PowerPoint - 5. Predavanje-w2.pptx
 Proizvodnja podržana računalom CAM 6. sem: IIM, PI, RI 5. predavanje 2018/2019 Zagreb, 3. travnja 2019. Proizvodnja Podjele i promjene proizvodnje Megatrendovi "Big Four" : Deloitte, PwC, EY, ikpmg. Promjena
Proizvodnja podržana računalom CAM 6. sem: IIM, PI, RI 5. predavanje 2018/2019 Zagreb, 3. travnja 2019. Proizvodnja Podjele i promjene proizvodnje Megatrendovi "Big Four" : Deloitte, PwC, EY, ikpmg. Promjena
Sveučilište u Zagrebu Fakultet prometnih znanosti Zavod za inteligentne transportne sustave Katedra za primijenjeno računarstvo Vježba: #7 Kolegij: Ba
 Sveučilište u Zagrebu Fakultet prometnih znanosti Zavod za inteligentne transportne sustave Katedra za primijenjeno računarstvo Vježba: #7 Kolegij: Baze podataka Tema: Osnovna SELECT naredba Vježbu pripremili:
Sveučilište u Zagrebu Fakultet prometnih znanosti Zavod za inteligentne transportne sustave Katedra za primijenjeno računarstvo Vježba: #7 Kolegij: Baze podataka Tema: Osnovna SELECT naredba Vježbu pripremili:
KORISNIČKE UPUTE APLIKACIJA ZA POTPIS DATOTEKA
 KORISNIČKE UPUTE APLIKACIJA ZA POTPIS DATOTEKA SADRŽAJ 1. UVOD... 3 1.1. Cilj i svrha... 3 1.2. Područje primjene... 3 2. POJMOVI I SKRAĆENICE... 4 3. PREDUVJETI KORIŠTENJA... 5 4. PREGLED APLIKACIJE...
KORISNIČKE UPUTE APLIKACIJA ZA POTPIS DATOTEKA SADRŽAJ 1. UVOD... 3 1.1. Cilj i svrha... 3 1.2. Područje primjene... 3 2. POJMOVI I SKRAĆENICE... 4 3. PREDUVJETI KORIŠTENJA... 5 4. PREGLED APLIKACIJE...
Test ispravio: (1) (2) Ukupan broj bodova: 21. veljače od 13:00 do 14:00 Županijsko natjecanje / Osnove informatike Osnovne škole Ime i prezime
 (2) Ukupan broj bodova: 21. veljače od 13:00 do 14:00 Županijsko natjecanje / Osnove informatike Osnovne škole Ime i prezime") Test ispravio: () () Ukupan broj bodova:. veljače 04. od 3:00 do 4:00 Ime i prezime Razred Škola Županija Mentor Sadržaj Upute za natjecatelje... Zadaci... Upute za natjecatelje Vrijeme pisanja: 60 minuta
Test ispravio: () () Ukupan broj bodova:. veljače 04. od 3:00 do 4:00 Ime i prezime Razred Škola Županija Mentor Sadržaj Upute za natjecatelje... Zadaci... Upute za natjecatelje Vrijeme pisanja: 60 minuta
PuTTY CERT.hr-PUBDOC
 PuTTY CERT.hr-PUBDOC-2018-12-371 Sadržaj 1 UVOD... 3 2 INSTALACIJA ALATA PUTTY... 4 3 KORIŠTENJE ALATA PUTTY... 7 3.1 POVEZIVANJE S UDALJENIM RAČUNALOM... 7 3.2 POHRANA PROFILA KORISNIČKIH SJEDNICA...
PuTTY CERT.hr-PUBDOC-2018-12-371 Sadržaj 1 UVOD... 3 2 INSTALACIJA ALATA PUTTY... 4 3 KORIŠTENJE ALATA PUTTY... 7 3.1 POVEZIVANJE S UDALJENIM RAČUNALOM... 7 3.2 POHRANA PROFILA KORISNIČKIH SJEDNICA...
RAČUNALO
 RAČUNALO HARDVER + SOFTVER RAČUNALO HARDVER strojna oprema računala tj. tvrdi, materijalni, opipljivi dijelovi računala kućište i sve komponente u njemu, vanjske jedinice SOFTVER neopipljivi dijelovi računala
RAČUNALO HARDVER + SOFTVER RAČUNALO HARDVER strojna oprema računala tj. tvrdi, materijalni, opipljivi dijelovi računala kućište i sve komponente u njemu, vanjske jedinice SOFTVER neopipljivi dijelovi računala
Microsoft Word - 6. RAZRED INFORMATIKA.doc
 Kriteriji ocjenjivanja i vrednovanja INFORMATIKA - 6. razred Nastavne cjeline: 1. Život na mreži 2. Pletemo mreže, prenosimo, štitimo, pohranjujemo i organiziramo podatke 3. Računalno razmišljanje i programiranje
Kriteriji ocjenjivanja i vrednovanja INFORMATIKA - 6. razred Nastavne cjeline: 1. Život na mreži 2. Pletemo mreže, prenosimo, štitimo, pohranjujemo i organiziramo podatke 3. Računalno razmišljanje i programiranje
Slide 1
 Kako jednostavnije preći na višu verziju Formsa Ivan Lovrić, Vedran Latin 14.10.2009. Sadržaj prezentacije Predmet migracije Razlozi za migraciju Infrastruktura potrebna za migraciju Pilot migracija Migracija
Kako jednostavnije preći na višu verziju Formsa Ivan Lovrić, Vedran Latin 14.10.2009. Sadržaj prezentacije Predmet migracije Razlozi za migraciju Infrastruktura potrebna za migraciju Pilot migracija Migracija
JMBAG Ime i Prezime Mreže računala Završni ispit 16. veljače Na kolokviju je dozvoljeno koristiti samo pribor za pisanje i službeni šalabahter.
 Mreže računala Završni ispit Na kolokviju je dozvoljeno koristiti samo pribor za pisanje i službeni šalabahter. Predajete samo papire koje ste dobili. Rezultati, uvid u ispit i upis ocjena:... Zadatak
Mreže računala Završni ispit Na kolokviju je dozvoljeno koristiti samo pribor za pisanje i službeni šalabahter. Predajete samo papire koje ste dobili. Rezultati, uvid u ispit i upis ocjena:... Zadatak
Microsoft PowerPoint - podatkovni promet za objavu.pptx
 1 2 3 Što je složaj protokola (protocol suite)? Pojedini protokol se odnosi samo na jedno pitanje koje omogućava komunikaciju. Kada se kombinira više protokola, grupa protokola koja je rezultat takve kombinacije
1 2 3 Što je složaj protokola (protocol suite)? Pojedini protokol se odnosi samo na jedno pitanje koje omogućava komunikaciju. Kada se kombinira više protokola, grupa protokola koja je rezultat takve kombinacije
Škola: Geodetska škola, Zagreb Razredni odijel: IV. D Datum: 22. studenog Školska godina: 2018./2019. Nastavnik: Katija Špika Mentor: Armando Sl
 Škola: Geodetska škola, Zagreb Razredni odijel: IV. D Datum: 22. studenog 2018. Školska godina: 2018./2019. Nastavnik: Katija Špika Mentor: Armando Slaviček Priprema za nastavni sat Predmet : Prostorni
Škola: Geodetska škola, Zagreb Razredni odijel: IV. D Datum: 22. studenog 2018. Školska godina: 2018./2019. Nastavnik: Katija Špika Mentor: Armando Slaviček Priprema za nastavni sat Predmet : Prostorni
Slide 1
 OSNOVNI POJMOVI Naredba je uputa računalu za obavljanje određene radnje. Program je niz naredbi razumljivih računalu koje rješavaju neki problem. Pisanje programa zovemo programiranje. Programski jezik
OSNOVNI POJMOVI Naredba je uputa računalu za obavljanje određene radnje. Program je niz naredbi razumljivih računalu koje rješavaju neki problem. Pisanje programa zovemo programiranje. Programski jezik
Microsoft Word - Dopunski_zadaci_iz_MFII_uz_III_kolokvij.doc
 Dopunski zadaci za vježbu iz MFII Za treći kolokvij 1. U paralelno strujanje fluida gustoće ρ = 999.8 kg/m viskoznosti μ = 1.1 1 Pa s brzinom v = 1.6 m/s postavljana je ravna ploča duljine =.7 m (u smjeru
Dopunski zadaci za vježbu iz MFII Za treći kolokvij 1. U paralelno strujanje fluida gustoće ρ = 999.8 kg/m viskoznosti μ = 1.1 1 Pa s brzinom v = 1.6 m/s postavljana je ravna ploča duljine =.7 m (u smjeru
(Microsoft Word - Dr\236avna matura - kolovoz ni\236a razina - rje\232enja)
") 1. C. Imamo redom: I. ZADATCI VIŠESTRUKOGA IZBORA. B. Imamo redom: 0.3 0. 8 7 8 19 ( 3) 4 : = 9 4 = 9 4 = 9 = =. 0. 0.3 3 3 3 3 0 1 3 + 1 + 4 8 5 5 = = = = = = 0 1 3 0 1 3 0 1+ 3 ( : ) ( : ) 5 5 4 0 3.
1. C. Imamo redom: I. ZADATCI VIŠESTRUKOGA IZBORA. B. Imamo redom: 0.3 0. 8 7 8 19 ( 3) 4 : = 9 4 = 9 4 = 9 = =. 0. 0.3 3 3 3 3 0 1 3 + 1 + 4 8 5 5 = = = = = = 0 1 3 0 1 3 0 1+ 3 ( : ) ( : ) 5 5 4 0 3.
Kriteriji ocjenjivanja 6razred
 Kriteriji ocjenjivanja 6razred Nastavne cjeline: 1. Obrada teksta 2. Računalne mreže 3. Internet 4. Multimediji 5. Izrada prezentacija 12 Nastavna cjelina: OBRADA TEKSTA Dobar (3) Dovoljan (2). prepoznaje
Kriteriji ocjenjivanja 6razred Nastavne cjeline: 1. Obrada teksta 2. Računalne mreže 3. Internet 4. Multimediji 5. Izrada prezentacija 12 Nastavna cjelina: OBRADA TEKSTA Dobar (3) Dovoljan (2). prepoznaje
INDIKATOR SVJETLA FUNKCIJE TIPKI 1. Prikazuje se temperatura i parametri upravljanja 2. Crveno svjetlo svijetli kad grijalica grije 3. Indikator zelen
 INDIKATOR SVJETLA FUNKCIJE TIPKI 1. Prikazuje se temperatura i parametri upravljanja 2. Crveno svjetlo svijetli kad grijalica grije 3. Indikator zelenog svjetla koji prikazuje sniženu temperaturu. Uključuje
INDIKATOR SVJETLA FUNKCIJE TIPKI 1. Prikazuje se temperatura i parametri upravljanja 2. Crveno svjetlo svijetli kad grijalica grije 3. Indikator zelenog svjetla koji prikazuje sniženu temperaturu. Uključuje
23. siječnja od 13:00 do 14:00 Školsko natjecanje / Osnove informatike Srednje škole RJEŠENJA ZADATAKA S OBJAŠNJENJIMA Sponzori Medijski pokrovi
 3. siječnja 0. od 3:00 do 4:00 RJEŠENJA ZADATAKA S OBJAŠNJENJIMA Sponzori Medijski pokrovitelji Sadržaj Zadaci. 4.... Zadaci 5. 0.... 3 od 8 Zadaci. 4. U sljedećim pitanjima na pitanja odgovaraš upisivanjem
3. siječnja 0. od 3:00 do 4:00 RJEŠENJA ZADATAKA S OBJAŠNJENJIMA Sponzori Medijski pokrovitelji Sadržaj Zadaci. 4.... Zadaci 5. 0.... 3 od 8 Zadaci. 4. U sljedećim pitanjima na pitanja odgovaraš upisivanjem
Matrice. Algebarske operacije s matricama. - Predavanje I
 Matrice.. Predavanje I Ines Radošević inesr@math.uniri.hr Odjel za matematiku Sveučilišta u Rijeci Matrice... Matrice... Podsjeti se... skup, element skupa,..., matematička logika skupovi brojeva N,...,
Matrice.. Predavanje I Ines Radošević inesr@math.uniri.hr Odjel za matematiku Sveučilišta u Rijeci Matrice... Matrice... Podsjeti se... skup, element skupa,..., matematička logika skupovi brojeva N,...,
Upute za samostalni dizajn i grafičku pripremu plakata BOJE Plakat je najuočljiviji kada se koriste kombinacije kontrastnih boja npr. kombinacija crne
 Upute za samostalni dizajn i grafičku pripremu plakata BOJE Plakat je najuočljiviji kada se koriste kombinacije kontrastnih boja npr. kombinacija crne podloge i žutog teksta, dok se najmanje vidljivom
Upute za samostalni dizajn i grafičku pripremu plakata BOJE Plakat je najuočljiviji kada se koriste kombinacije kontrastnih boja npr. kombinacija crne podloge i žutog teksta, dok se najmanje vidljivom
(Microsoft Word - Dr\236avna matura - studeni osnovna razina - rje\232enja)
") 1. C. Imamo redom: I. ZADATCI VIŠESTRUKOGA IZBORA 9 + 7 6 9 + 4 51 = = = 5.1 18 4 18 8 10. B. Pomoću kalkulatora nalazimo 10 1.5 = 63.45553. Četvrta decimala je očito jednaka 5, pa se zaokruživanje vrši
1. C. Imamo redom: I. ZADATCI VIŠESTRUKOGA IZBORA 9 + 7 6 9 + 4 51 = = = 5.1 18 4 18 8 10. B. Pomoću kalkulatora nalazimo 10 1.5 = 63.45553. Četvrta decimala je očito jednaka 5, pa se zaokruživanje vrši
Metode za automatsko podešavanje boje i svjetline slike
 Metode za automatsko podešavanje boje i svjetline slike Mentor: prof. dr. sc. Sven Lončarić Student: Nikola Banić Zagreb, 9. srpnja 2013. Sadržaj Uvod Boje Postojanost boja Algoritmi za podešavanje boja
Metode za automatsko podešavanje boje i svjetline slike Mentor: prof. dr. sc. Sven Lončarić Student: Nikola Banić Zagreb, 9. srpnja 2013. Sadržaj Uvod Boje Postojanost boja Algoritmi za podešavanje boja
Slide 1
 0(a) 0(b) 0(c) 0(d) 0(e) :: :: Neke fizikalne veličine poput indeksa loma u anizotropnim sredstvima ovise o iznosu i smjeru, a nisu vektori. Stoga se namede potreba poopdavanja. Međutim, fizikalne veličine,
0(a) 0(b) 0(c) 0(d) 0(e) :: :: Neke fizikalne veličine poput indeksa loma u anizotropnim sredstvima ovise o iznosu i smjeru, a nisu vektori. Stoga se namede potreba poopdavanja. Međutim, fizikalne veličine,
Stručno usavršavanje
 TOPLINSKI MOSTOVI IZRAČUN PO HRN EN ISO 14683 U organizaciji: TEHNIČKI PROPIS O RACIONALNOJ UPORABI ENERGIJE I TOPLINSKOJ ZAŠTITI U ZGRADAMA (NN 128/15, 70/18, 73/18, 86/18) dalje skraćeno TP Čl. 4. 39.
TOPLINSKI MOSTOVI IZRAČUN PO HRN EN ISO 14683 U organizaciji: TEHNIČKI PROPIS O RACIONALNOJ UPORABI ENERGIJE I TOPLINSKOJ ZAŠTITI U ZGRADAMA (NN 128/15, 70/18, 73/18, 86/18) dalje skraćeno TP Čl. 4. 39.
8 2 upiti_izvjesca.indd
 1 2. Baze podataka Upiti i izvješća baze podataka Na početku cjeline o bazama podataka napravili ste plošnu bazu podataka o natjecanjima učenika. Sada ćete izraditi relacijsku bazu u Accessu o učenicima
1 2. Baze podataka Upiti i izvješća baze podataka Na početku cjeline o bazama podataka napravili ste plošnu bazu podataka o natjecanjima učenika. Sada ćete izraditi relacijsku bazu u Accessu o učenicima
Državna matura iz informatike
 DRŽAVNA MATURA IZ INFORMATIKE U ŠK. GOD. 2013./14. 2016./17. SADRŽAJ Osnovne informacije o ispitu iz informatike Područja ispitivanja Pragovi prolaznosti u 2014./15. Primjeri zadataka po područjima ispitivanja
DRŽAVNA MATURA IZ INFORMATIKE U ŠK. GOD. 2013./14. 2016./17. SADRŽAJ Osnovne informacije o ispitu iz informatike Područja ispitivanja Pragovi prolaznosti u 2014./15. Primjeri zadataka po područjima ispitivanja
Microsoft Word - IP_Tables_programski_alat.doc
 1. IP Tables alat (pregled naredbi) 1.1. Osnovne IP Tables naredbe za filtriranje paketa U ovom poglavlju opisane su osnovne IP Tables naredbe korištene za filtriranje paketa. S programskim paketom IP
1. IP Tables alat (pregled naredbi) 1.1. Osnovne IP Tables naredbe za filtriranje paketa U ovom poglavlju opisane su osnovne IP Tables naredbe korištene za filtriranje paketa. S programskim paketom IP
PRIKAZIVAČ BRZINE I BROJILO PROMETA ZA STATISTIČKU OBRADU PODATAKA
 PRIKAZIVAČ BRZINE I BROJILO PROMETA ZA STATISTIČKU OBRADU PODATAKA PRIKAZIVAČ BRZINE SA TEKSTUALNIM PORUKAMA Prikazivač brzine prikazuje tekstualnu poruku ili znak opasnosti u skladu sa detektiranom brzinom.
PRIKAZIVAČ BRZINE I BROJILO PROMETA ZA STATISTIČKU OBRADU PODATAKA PRIKAZIVAČ BRZINE SA TEKSTUALNIM PORUKAMA Prikazivač brzine prikazuje tekstualnu poruku ili znak opasnosti u skladu sa detektiranom brzinom.
Microsoft Word - 24ms241
 Zadatak (Branko, srednja škola) Parabola zadana jednadžbom = p x prolazi točkom tangente na tu parabolu u točki A? A,. A. x + = 0 B. x 8 = 0 C. x = 0 D. x + + = 0 Rješenje b a b a b a =, =. c c b a Kako
Zadatak (Branko, srednja škola) Parabola zadana jednadžbom = p x prolazi točkom tangente na tu parabolu u točki A? A,. A. x + = 0 B. x 8 = 0 C. x = 0 D. x + + = 0 Rješenje b a b a b a =, =. c c b a Kako
PLAN I PROGRAM ZA DOPUNSKU (PRODUŽNU) NASTAVU IZ MATEMATIKE (za 1. razred)
 NASTAVU IZ MATEMATIKE (za 1. razred)") PLAN I PROGRAM ZA DOPUNSKU (PRODUŽNU) NASTAVU IZ MATEMATIKE (za 1. razred) Učenik prvog razreda treba ostvarit sljedeće minimalne standarde 1. SKUP REALNIH BROJEVA -razlikovati brojevne skupove i njihove
PLAN I PROGRAM ZA DOPUNSKU (PRODUŽNU) NASTAVU IZ MATEMATIKE (za 1. razred) Učenik prvog razreda treba ostvarit sljedeće minimalne standarde 1. SKUP REALNIH BROJEVA -razlikovati brojevne skupove i njihove
Microsoft Word - Akreditacija 2013
 07.10.2017 ОСНОВНЕ АКАДЕМСКЕ СТУДИЈЕ (АКРЕДИТАЦИЈА 2013) Модул: СВИ Година I Од II до IV Семестар I II IV-VIII Лабораторијски практикум - Увод у рачунарство Алгоритми и програмирање Математика 1 Математика
07.10.2017 ОСНОВНЕ АКАДЕМСКЕ СТУДИЈЕ (АКРЕДИТАЦИЈА 2013) Модул: СВИ Година I Од II до IV Семестар I II IV-VIII Лабораторијски практикум - Увод у рачунарство Алгоритми и програмирање Математика 1 Математика
ALIP1_udzb_2019.indb
 Razmislimo Kako u memoriji računala prikazujemo tekst, brojeve, slike? Gdje se spremaju svi ti podatci? Kako uopće izgleda memorija računala i koji ju elektronički sklopovi čine? Kako biste znali odgovoriti
Razmislimo Kako u memoriji računala prikazujemo tekst, brojeve, slike? Gdje se spremaju svi ti podatci? Kako uopće izgleda memorija računala i koji ju elektronički sklopovi čine? Kako biste znali odgovoriti
Programski jezik QBasic Kriteriji ocjenjivanja programiranje(b) - QBasic razred 42
 - QBasic razred 42") Kriteriji ocjenjivanja programiranje(b) - QBasic 5. - 8. razred 42 5. RAZRED - prisjeća sa pojmova: algoritam, algoritma slijeda i grananja, dijagrama toka, te ulaznih i izlaznih jedinica, ne shvaća njihovo
Kriteriji ocjenjivanja programiranje(b) - QBasic 5. - 8. razred 42 5. RAZRED - prisjeća sa pojmova: algoritam, algoritma slijeda i grananja, dijagrama toka, te ulaznih i izlaznih jedinica, ne shvaća njihovo
Programski jezik QBasic Kriteriji ocjenjivanja programiranje(b) - QBasic razred 42
 - QBasic razred 42") Kriteriji ocjenjivanja programiranje(b) - QBasic 5. - 8. razred 42 5. RAZRED - prisjeća sa pojmova: algoritam, algoritma slijeda i grananja, dijagrama toka, te ulaznih i izlaznih jedinica, ne shvaća njihovo
Kriteriji ocjenjivanja programiranje(b) - QBasic 5. - 8. razred 42 5. RAZRED - prisjeća sa pojmova: algoritam, algoritma slijeda i grananja, dijagrama toka, te ulaznih i izlaznih jedinica, ne shvaća njihovo
EUROPSKA KOMISIJA Bruxelles, C(2018) 3697 final ANNEXES 1 to 2 PRILOZI PROVEDBENOJ UREDBI KOMISIJE (EU) /... o izmjeni Uredbe (EU) br. 1301
 3697 final ANNEXES 1 to 2 PRILOZI PROVEDBENOJ UREDBI KOMISIJE (EU) /... o izmjeni Uredbe (EU) br. 1301") EUROPSKA KOMISIJA Bruxelles, 13.6.2018. C(2018) 3697 final ANNEXES 1 to 2 PRILOZI PROVEDBENOJ UREDBI KOMISIJE (EU) /... o izmjeni Uredbe (EU) br. 1301/2014 i Uredbe (EU) br. 1302/2014 u pogledu odredaba
EUROPSKA KOMISIJA Bruxelles, 13.6.2018. C(2018) 3697 final ANNEXES 1 to 2 PRILOZI PROVEDBENOJ UREDBI KOMISIJE (EU) /... o izmjeni Uredbe (EU) br. 1301/2014 i Uredbe (EU) br. 1302/2014 u pogledu odredaba
Državno natjecanje / Osnove informatike Srednje škole Zadaci U sljedećim pitanjima na odgovore odgovaraš upisivanjem slova koji se nalazi ispred
 Zadaci. 8. U sljedećim pitanjima na odgovore odgovaraš upisivanjem slova koji se nalazi ispred točnog odgovora, u za to predviđen prostor. Odgovor Ako želimo stvoriti i pohraniti sliku, ali tako da promjenom
Zadaci. 8. U sljedećim pitanjima na odgovore odgovaraš upisivanjem slova koji se nalazi ispred točnog odgovora, u za to predviđen prostor. Odgovor Ako želimo stvoriti i pohraniti sliku, ali tako da promjenom
VIK-01 opis
 Višenamensko interfejsno kolo VIK-01 Višenamensko interfejsno kolo VIK-01 (slika 1) služi za povezivanje različitih senzora: otpornog senzora temperature, mernih traka u mostnoj vezi, termopara i dr. Pored
Višenamensko interfejsno kolo VIK-01 Višenamensko interfejsno kolo VIK-01 (slika 1) služi za povezivanje različitih senzora: otpornog senzora temperature, mernih traka u mostnoj vezi, termopara i dr. Pored
SVEUČILIŠTE U ZAGREBU FAKULTET ORGANIZACIJE I INFORMATIKE V A R A Ž D I N Mario Habrun USPOREDBA MODELA BOJA I PRIMJENA U RAČUNALNOJ GRAFICI ZAVRŠNI R
 SVEUČILIŠTE U ZAGREBU FAKULTET ORGANIZACIJE I INFORMATIKE V A R A Ž D I N Mario Habrun USPOREDBA MODELA BOJA I PRIMJENA U RAČUNALNOJ GRAFICI ZAVRŠNI RAD Varaždin, 2018. SVEUČILIŠTE U ZAGREBU FAKULTET ORGANIZACIJE
SVEUČILIŠTE U ZAGREBU FAKULTET ORGANIZACIJE I INFORMATIKE V A R A Ž D I N Mario Habrun USPOREDBA MODELA BOJA I PRIMJENA U RAČUNALNOJ GRAFICI ZAVRŠNI RAD Varaždin, 2018. SVEUČILIŠTE U ZAGREBU FAKULTET ORGANIZACIJE
Matematika 1 - izborna
 3.3. NELINEARNE DIOFANTSKE JEDNADŽBE Navest ćemo sada neke metode rješavanja diofantskih jednadžbi koje su drugog i viših stupnjeva. Sve su te metode zapravo posebni oblici jedne opće metode, koja se naziva
3.3. NELINEARNE DIOFANTSKE JEDNADŽBE Navest ćemo sada neke metode rješavanja diofantskih jednadžbi koje su drugog i viših stupnjeva. Sve su te metode zapravo posebni oblici jedne opće metode, koja se naziva
AKVIZICIJA PODATAKA SA UREĐAJEM NI USB-6008 NI USB-6008 je jednostavni višenamjenski uređaj koji se koristi za akviziciju podataka (preko USBa), kao i
, kao i") AKVIZICIJA PODATAKA SA UREĐAJEM NI USB-6008 NI USB-6008 je jednostavni višenamjenski uređaj koji se koristi za akviziciju podataka (preko USBa), kao i za generisanje željenih izlaznih signala (slika 1).
AKVIZICIJA PODATAKA SA UREĐAJEM NI USB-6008 NI USB-6008 je jednostavni višenamjenski uređaj koji se koristi za akviziciju podataka (preko USBa), kao i za generisanje željenih izlaznih signala (slika 1).
Toplinska i električna vodljivost metala
 Električna vodljivost metala Cilj vježbe Određivanje koeficijenta električne vodljivosti bakra i aluminija U-I metodom. Teorijski dio Eksperimentalno je utvrđeno da otpor ne-ohmskog vodiča raste s porastom
Električna vodljivost metala Cilj vježbe Određivanje koeficijenta električne vodljivosti bakra i aluminija U-I metodom. Teorijski dio Eksperimentalno je utvrđeno da otpor ne-ohmskog vodiča raste s porastom
Microsoft Word - Korisnički priručnik za liječnika.docx
 Korisnički priručnik za liječnika DijabetesTV Više uspješnih liječenja. Manje nepotrebnih pregleda. Manje gužvi. Datum: 26. Ožujka 2018. Korisnički priručnik za liječnika 1.0. Funkcionalnost DijabetesTV-a
Korisnički priručnik za liječnika DijabetesTV Više uspješnih liječenja. Manje nepotrebnih pregleda. Manje gužvi. Datum: 26. Ožujka 2018. Korisnički priručnik za liječnika 1.0. Funkcionalnost DijabetesTV-a
Sveučilište J.J. Strossmayera Fizika 2 FERIT Predložak za laboratorijske vježbe Određivanje relativne permitivnosti sredstva Cilj vježbe Određivanje r
 Sveučilište J.J. Strossmayera Fizika 2 Predložak za laboratorijske vježbe Cilj vježbe Određivanje relativne permitivnosti stakla, plastike, papira i zraka mjerenjem kapaciteta pločastog kondenzatora U-I
Sveučilište J.J. Strossmayera Fizika 2 Predložak za laboratorijske vježbe Cilj vježbe Određivanje relativne permitivnosti stakla, plastike, papira i zraka mjerenjem kapaciteta pločastog kondenzatora U-I
Mentor: Ružica Mlinarić, mag. inf. Računalstvo Usporedba programskih jezika Sabirnice Operacijski sustav Windows 10 Operacijski sustav ios Osnovna gra
 Mentor: Ružica Mlinarić, mag. inf. Računalstvo Usporedba programskih jezika Sabirnice Operacijski sustav Windows 10 Operacijski sustav ios Osnovna građa računala Ulazni uređaji Informacijski sustavi Multimedijalne
Mentor: Ružica Mlinarić, mag. inf. Računalstvo Usporedba programskih jezika Sabirnice Operacijski sustav Windows 10 Operacijski sustav ios Osnovna građa računala Ulazni uređaji Informacijski sustavi Multimedijalne
Recuva CERT.hr-PUBDOC
 Recuva CERT.hr-PUBDOC-2019-5-379 Sadržaj 1 UVOD... 3 2 INSTALACIJA ALATA RECUVA... 4 3 KORIŠTENJE ALATA RECUVA... 7 4 ZAKLJUČAK... 13 Ovaj dokument izradio je Laboratorij za sustave i signale Zavoda za
Recuva CERT.hr-PUBDOC-2019-5-379 Sadržaj 1 UVOD... 3 2 INSTALACIJA ALATA RECUVA... 4 3 KORIŠTENJE ALATA RECUVA... 7 4 ZAKLJUČAK... 13 Ovaj dokument izradio je Laboratorij za sustave i signale Zavoda za
Microsoft Word - KORISNIČKA UPUTA za pripremu računala za rad s Fina potpisnim modulom_RSV_ doc
 Uputa za pripremu računala za rad s Fininim potpisnim modulom Zagreb, lipanj 2019. Sadržaj: 1. UVOD... 3 2. POJMOVI I SKRAĆENICE... 3 3. TEHNIČKI PREDUVJETI KORIŠTENJA... 3 4. PODEŠAVANJE INTERNET PREGLEDNIKA
Uputa za pripremu računala za rad s Fininim potpisnim modulom Zagreb, lipanj 2019. Sadržaj: 1. UVOD... 3 2. POJMOVI I SKRAĆENICE... 3 3. TEHNIČKI PREDUVJETI KORIŠTENJA... 3 4. PODEŠAVANJE INTERNET PREGLEDNIKA
Microsoft Word - 15ms261
 Zadatak 6 (Mirko, elektrotehnička škola) Rješenje 6 Odredite sup S, inf S, ma S i min S u skupu R ako je S = { R } a b = a a b + b a b, c < 0 a c b c. ( ), : 5. Skratiti razlomak znači brojnik i nazivnik
Zadatak 6 (Mirko, elektrotehnička škola) Rješenje 6 Odredite sup S, inf S, ma S i min S u skupu R ako je S = { R } a b = a a b + b a b, c < 0 a c b c. ( ), : 5. Skratiti razlomak znači brojnik i nazivnik
Microsoft Word - Akreditacija 2013
 ОСНОВНЕ АКАДЕМСКЕ СТУДИЈЕ (АКРЕДИТАЦИЈА 2013) Модул: СВИ Година I Од II до IV Семестар I II IV-VII 18.09.2017 Алгоритми и програмирање 19.09.2017 Математика 1 20.09.2017 Математика 2 21.09.2017 Увод у
ОСНОВНЕ АКАДЕМСКЕ СТУДИЈЕ (АКРЕДИТАЦИЈА 2013) Модул: СВИ Година I Од II до IV Семестар I II IV-VII 18.09.2017 Алгоритми и програмирање 19.09.2017 Математика 1 20.09.2017 Математика 2 21.09.2017 Увод у
No Slide Title
 Statistika je skup metoda za uređivanje, analiziranje i grafičko prikazivanje podataka. statistika???? Podatak je kvantitativna ili kvalitativna vrijednost kojom je opisano određeno obilježje (svojstvo)
Statistika je skup metoda za uređivanje, analiziranje i grafičko prikazivanje podataka. statistika???? Podatak je kvantitativna ili kvalitativna vrijednost kojom je opisano određeno obilježje (svojstvo)
Microsoft Word - 6ms001
 Zadatak 001 (Anela, ekonomska škola) Riješi sustav jednadžbi: 5 z = 0 + + z = 14 4 + + z = 16 Rješenje 001 Sustav rješavamo Gaussovom metodom eliminacije (isključivanja). Gaussova metoda provodi se pomoću
Zadatak 001 (Anela, ekonomska škola) Riješi sustav jednadžbi: 5 z = 0 + + z = 14 4 + + z = 16 Rješenje 001 Sustav rješavamo Gaussovom metodom eliminacije (isključivanja). Gaussova metoda provodi se pomoću
Klasifikacija slika kucnih brojeva dubokim konvolucijskim modelima
 Klasifikacija slika kućnih brojeva dubokim konvolucijskim modelima Ivan Šego 4. srpnja 2018. Sadržaj 1 Uvod 2 Konvolucijske neuronske mreže Konvolucijski sloj Sloj sažimanja Potpuno povezani sloj 3 Ispitni
Klasifikacija slika kućnih brojeva dubokim konvolucijskim modelima Ivan Šego 4. srpnja 2018. Sadržaj 1 Uvod 2 Konvolucijske neuronske mreže Konvolucijski sloj Sloj sažimanja Potpuno povezani sloj 3 Ispitni
MultiBoot Korisnički priručnik
 MultiBoot Korisnički priručnik Autorsko pravo 2006., 2007. Hewlett- Packard Development Company, L.P. Informacije sadržane u ovom dokumentu podložne su promjenama bez najave. Jedina jamstva za HP-ove proizvode
MultiBoot Korisnički priručnik Autorsko pravo 2006., 2007. Hewlett- Packard Development Company, L.P. Informacije sadržane u ovom dokumentu podložne su promjenama bez najave. Jedina jamstva za HP-ove proizvode
Microsoft Word - CCERT-PUBDOC doc
 Analiza Qchain programskog paketa CCERT-PUBDOC-2003-02-04 Sigurnosni problemi u računalnim programima i operativnim sustavima područje je na kojem CARNet CERT kontinuirano radi. Rezultat toga rada ovaj
Analiza Qchain programskog paketa CCERT-PUBDOC-2003-02-04 Sigurnosni problemi u računalnim programima i operativnim sustavima područje je na kojem CARNet CERT kontinuirano radi. Rezultat toga rada ovaj
Smjernice za korištenje sustava online prijava Ukoliko imate pristupno korisničko ime i lozinku ili ste navedeno dobili nakon zahtjeva za otvaranje no
 Smjernice za korištenje sustava online prijava Ukoliko imate pristupno korisničko ime i lozinku ili ste navedeno dobili nakon zahtjeva za otvaranje novog korisničkog računa (poslati zahtjev na javnipoziv.opp@havc.hr
Smjernice za korištenje sustava online prijava Ukoliko imate pristupno korisničko ime i lozinku ili ste navedeno dobili nakon zahtjeva za otvaranje novog korisničkog računa (poslati zahtjev na javnipoziv.opp@havc.hr
VELEUČILIŠTE VELIKA GORICA REZULTATI STUDENTSKE ANKETE PROVEDENE NA VELEUČILIŠTU VELIKA GORICA ZA ZIMSKI SEMESTAR AKADEMSKE 2013/2014 GODINE 1. Uvod E
 REZULTATI STUDENTSKE ANKETE PROVEDENE NA VELEUČILIŠTU VELIKA GORICA ZA ZIMSKI SEMESTAR AKADEMSKE 2013/2014 GODINE 1. Uvod Evaluacijska anketa nastavnika i nastavnih predmeta provedena je putem interneta.
REZULTATI STUDENTSKE ANKETE PROVEDENE NA VELEUČILIŠTU VELIKA GORICA ZA ZIMSKI SEMESTAR AKADEMSKE 2013/2014 GODINE 1. Uvod Evaluacijska anketa nastavnika i nastavnih predmeta provedena je putem interneta.
Microsoft Word - predavanje8
 DERIVACIJA KOMPOZICIJE FUNKCIJA Ponekad je potrebno derivirati funkcije koje nisu jednostavne (složene su). Na primjer, funkcija sin2 je kompozicija funkcija sin (vanjska funkcija) i 2 (unutarnja funkcija).
DERIVACIJA KOMPOZICIJE FUNKCIJA Ponekad je potrebno derivirati funkcije koje nisu jednostavne (složene su). Na primjer, funkcija sin2 je kompozicija funkcija sin (vanjska funkcija) i 2 (unutarnja funkcija).
Microsoft Word - Vezba 3_Stilometrija-uputstvo za vezbu (Repaired).doc
.doc") СПЕКТРОСКОПСКО ОДРЕЂИВАЊЕ САСТАВА ЛЕГУРЕ Табела 1: Области таласних дужина у видљивом делу спектра за сваку боју појединачно Боја Област таласних дужина nm Љубичаста 400 420 Индиго 420 440 Плава 440 490
СПЕКТРОСКОПСКО ОДРЕЂИВАЊЕ САСТАВА ЛЕГУРЕ Табела 1: Области таласних дужина у видљивом делу спектра за сваку боју појединачно Боја Област таласних дужина nm Љубичаста 400 420 Индиго 420 440 Плава 440 490
Elementi praćenja i ocjenjivanja za nastavni predmet Matematika u 4. razredu Elementi praćenja i ocjenjivanja za nastavni predmet Matematika u 4. razr
 Elementi praćenja i ocjenjivanja za nastavni predmet Matematika u 4. razredu ODLIČAN (5) navodi primjer kuta kao dijela ravnine omeđenog polupravcima analizira i uspoređuje vrh i krakove kuta analizira
Elementi praćenja i ocjenjivanja za nastavni predmet Matematika u 4. razredu ODLIČAN (5) navodi primjer kuta kao dijela ravnine omeđenog polupravcima analizira i uspoređuje vrh i krakove kuta analizira
Microsoft Word - Svrha projekta.doc
 S V E U Č I L I Š T E U Z A G R E B U FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA Zavod za elektroničke sustave i obradbu informacija FER 2 program, 1. godina diplomskog studija Kolegij: Sustavi za praćenje
S V E U Č I L I Š T E U Z A G R E B U FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA Zavod za elektroničke sustave i obradbu informacija FER 2 program, 1. godina diplomskog studija Kolegij: Sustavi za praćenje
Uvod u statistiku
 Uvod u statistiku Osnovni pojmovi Statistika nauka o podacima Uključuje prikupljanje, klasifikaciju, prikaz, obradu i interpretaciju podataka Staistička jedinica objekat kome se mjeri neko svojstvo. Svi
Uvod u statistiku Osnovni pojmovi Statistika nauka o podacima Uključuje prikupljanje, klasifikaciju, prikaz, obradu i interpretaciju podataka Staistička jedinica objekat kome se mjeri neko svojstvo. Svi
Microsoft Word - Akreditacija 2013
 ИСПИТНИ РОК: ОКТОБАР 2 2017/2018 ОСНОВНЕ АКАДЕМСКЕ СТУДИЈЕ (АКРЕДИТАЦИЈА 2013) Модул: СВИ Година I Од II до IV Семестар I II IV-VIII Лабораторијски практикум - Алгоритми и програмирање Лабораторијски практикум
ИСПИТНИ РОК: ОКТОБАР 2 2017/2018 ОСНОВНЕ АКАДЕМСКЕ СТУДИЈЕ (АКРЕДИТАЦИЈА 2013) Модул: СВИ Година I Од II до IV Семестар I II IV-VIII Лабораторијски практикум - Алгоритми и програмирање Лабораторијски практикум
7. predavanje Vladimir Dananić 14. studenoga Vladimir Dananić () 7. predavanje 14. studenoga / 16
 7. predavanje 14. studenoga / 16") 7. predavanje Vladimir Dananić 14. studenoga 2011. Vladimir Dananić () 7. predavanje 14. studenoga 2011. 1 / 16 Sadržaj 1 Operator kutne količine gibanja 2 3 Zadatci Vladimir Dananić () 7. predavanje 14.
7. predavanje Vladimir Dananić 14. studenoga 2011. Vladimir Dananić () 7. predavanje 14. studenoga 2011. 1 / 16 Sadržaj 1 Operator kutne količine gibanja 2 3 Zadatci Vladimir Dananić () 7. predavanje 14.
Microsoft Word - Akreditacija 2013
 ИСПИТНИ РОК: СЕПТЕМБАР 2018/2019 ОСНОВНЕ АКАДЕМСКЕ СТУДИЈЕ (АКРЕДИТАЦИЈА 2013) Модул: СВИ Година I Од II до IV Семестар I II IV-VII Лабораторијски практикум Физика Лабораторијски практикум - Увод у рачунарство
ИСПИТНИ РОК: СЕПТЕМБАР 2018/2019 ОСНОВНЕ АКАДЕМСКЕ СТУДИЈЕ (АКРЕДИТАЦИЈА 2013) Модул: СВИ Година I Од II до IV Семестар I II IV-VII Лабораторијски практикум Физика Лабораторијски практикум - Увод у рачунарство
Microsoft Word - 24ms221
 Zadatak (Katarina, maturantica) Kružnica dira os apscisa u točki (3, 0) i siječe os ordinata u točki (0, 0). Koliki je polumjer te kružnice? A. 5 B. 5.45 C. 6.5. 7.38 Rješenje Kružnica je skup svih točaka
Zadatak (Katarina, maturantica) Kružnica dira os apscisa u točki (3, 0) i siječe os ordinata u točki (0, 0). Koliki je polumjer te kružnice? A. 5 B. 5.45 C. 6.5. 7.38 Rješenje Kružnica je skup svih točaka
Satnica.xlsx
 ПОНЕДЕЉАК 17.06.2019 2Б-УПС Електрична кола 24 Б-УПС Електрична кола 1 УПС Теорија кола 2 2Б-ЕЕН Електрична кола у електроенергетици 8 Б-ЕЕН Електрична кола 1 ЕЕН Теорија електричних кола 1 А1 2Б-ЕЛК Дигитална
ПОНЕДЕЉАК 17.06.2019 2Б-УПС Електрична кола 24 Б-УПС Електрична кола 1 УПС Теорија кола 2 2Б-ЕЕН Електрична кола у електроенергетици 8 Б-ЕЕН Електрична кола 1 ЕЕН Теорија електричних кола 1 А1 2Б-ЕЛК Дигитална
PROGRAMIRANJE Program je niz naredbi razumljivih računalu koje rješavaju neki problem. Algoritam je postupak raščlanjivanja problema na jednostavnije
 PROGRAMIRANJE Program je niz naredbi razumljivih računalu koje rješavaju neki problem. Algoritam je postupak raščlanjivanja problema na jednostavnije korake. Uz dobro razrađen algoritam neku radnju ćemo
PROGRAMIRANJE Program je niz naredbi razumljivih računalu koje rješavaju neki problem. Algoritam je postupak raščlanjivanja problema na jednostavnije korake. Uz dobro razrađen algoritam neku radnju ćemo
Prostorna kalibracija LYSO detektora osetljivog na poziciju
 Prostorna kalibracija LYSO detektora osetljivog na poziciju Brankica Anđelić df.brankica.andjelic@student.pmf.uns.ac.rs Departman za fiziku, Univerzitet u Novom Sadu 3. oktobar 215. Brankica Anđelić Prostorna
Prostorna kalibracija LYSO detektora osetljivog na poziciju Brankica Anđelić df.brankica.andjelic@student.pmf.uns.ac.rs Departman za fiziku, Univerzitet u Novom Sadu 3. oktobar 215. Brankica Anđelić Prostorna
Sveučilište J.J. Strossmayera Fizika 2 FERIT Predložak za laboratorijske vježbe Cilj vježbe Određivanje specifičnog naboja elektrona Odrediti specifič
 Cilj vježbe Određivanje specifičnog naboja elektrona Odrediti specifični naboja elektrona (omjer e/me) iz poznatog polumjera putanje elektronske zrake u elektronskoj cijevi, i poznatog napona i jakosti
Cilj vježbe Određivanje specifičnog naboja elektrona Odrediti specifični naboja elektrona (omjer e/me) iz poznatog polumjera putanje elektronske zrake u elektronskoj cijevi, i poznatog napona i jakosti
AM_Ple_NonLegReport
 9.2.2017 A8-0005/9 Amandman 9 Stavak 1.a (novi) 1 a. poziva Komisiju da predloži sljedeće zajedničke europske definicije: umjetna inteligencija je automatizirani sustav s mogućnošću simulacije nekih ljudskih
9.2.2017 A8-0005/9 Amandman 9 Stavak 1.a (novi) 1 a. poziva Komisiju da predloži sljedeće zajedničke europske definicije: umjetna inteligencija je automatizirani sustav s mogućnošću simulacije nekih ljudskih
4.1 The Concepts of Force and Mass
 Interferencija i valna priroda svjetlosti FIZIKA PSS-GRAD 23. siječnja 2019. 27.1 Načelo linearne superpozicije Kad dva svjetlosna vala, ili više njih, prolaze kroz istu točku, njihova se električna polja
Interferencija i valna priroda svjetlosti FIZIKA PSS-GRAD 23. siječnja 2019. 27.1 Načelo linearne superpozicije Kad dva svjetlosna vala, ili više njih, prolaze kroz istu točku, njihova se električna polja
DUBINSKA ANALIZA PODATAKA
 DUBINSKA ANALIZA PODATAKA () ASOCIJACIJSKA PRAVILA (ENGL. ASSOCIATION RULE) Studeni 2018. Mario Somek SADRŽAJ Asocijacijska pravila? Oblici učenja pravila Podaci za analizu Algoritam Primjer Izvođenje
DUBINSKA ANALIZA PODATAKA () ASOCIJACIJSKA PRAVILA (ENGL. ASSOCIATION RULE) Studeni 2018. Mario Somek SADRŽAJ Asocijacijska pravila? Oblici učenja pravila Podaci za analizu Algoritam Primjer Izvođenje
Prikaz znakova u računalu
 PRIKAZ ZNAKOVA U RAČUNALU Načini kodiranja ASCII 1 znak 7 bitova Prošireni ASCII 1 znak 8 bitova (1B) UNICODE 1 znak 16 bitova (2B) ZADATCI S MATURE ljetni rok, 2014., zadatak 11 Koliko se različitih znakova
PRIKAZ ZNAKOVA U RAČUNALU Načini kodiranja ASCII 1 znak 7 bitova Prošireni ASCII 1 znak 8 bitova (1B) UNICODE 1 znak 16 bitova (2B) ZADATCI S MATURE ljetni rok, 2014., zadatak 11 Koliko se različitih znakova
Trimble Access Software Upute za korištenje V2.0 Geomatika-Smolčak d.o.o.
 Trimble Access Software Upute za korištenje V2.0 Geomatika-Smolčak d.o.o. 1. Uvod Ove upute su pisane s ciljem da se kroz rad na konkretnom primjeru omogući brži početak korištenja Trimble Access Software-a.
Trimble Access Software Upute za korištenje V2.0 Geomatika-Smolčak d.o.o. 1. Uvod Ove upute su pisane s ciljem da se kroz rad na konkretnom primjeru omogući brži početak korištenja Trimble Access Software-a.
Za formiranje JOPPD obrasca neophodno je točno popuniti šifre u osnovama primitaka. Svaka osnova primitka ima propisane šifre u prilozima JOPPD
 Za formiranje JOPPD obrasca neophodno je točno popuniti šifre u osnovama primitaka. Svaka osnova primitka ima propisane šifre u prilozima 2.- 4. JOPPD obrasca i za svaku kombinaciju šifri su propisana
Za formiranje JOPPD obrasca neophodno je točno popuniti šifre u osnovama primitaka. Svaka osnova primitka ima propisane šifre u prilozima 2.- 4. JOPPD obrasca i za svaku kombinaciju šifri su propisana
NIAS Projekt e-građani KORISNIČKA UPUTA za aplikaciju NIAS Verzija 1.1 Zagreb, srpanj 2014.
 Projekt e-građani KORISNIČKA UPUTA za aplikaciju Verzija 1.1 Zagreb, srpanj 2014. Naslov: Opis: Korisnička uputa za aplikaciju Dokument sadrži upute korisnicima aplikacije u sustavu e-građani Ključne riječi:
Projekt e-građani KORISNIČKA UPUTA za aplikaciju Verzija 1.1 Zagreb, srpanj 2014. Naslov: Opis: Korisnička uputa za aplikaciju Dokument sadrži upute korisnicima aplikacije u sustavu e-građani Ključne riječi:
Microsoft Word - Rjesenja zadataka
 1. C. Svi elementi zadanoga intervala su realni brojevi strogo veći od 4 i strogo manji od. Brojevi i 5 nisu strogo veći od 4, a 1 nije strogo manji od. Jedino je broj 3 strogo veći od 4 i strogo manji
1. C. Svi elementi zadanoga intervala su realni brojevi strogo veći od 4 i strogo manji od. Brojevi i 5 nisu strogo veći od 4, a 1 nije strogo manji od. Jedino je broj 3 strogo veći od 4 i strogo manji
I година Назив предмета I термин Вријеме Сала Математика :00 све Основи електротехнике :00 све Програмирање
 I година Математика 1 2225 03.10.2019. 15:00 све Основи електротехнике 1 2226 30.09.2019. 15:00 све Програмирање 1 2227 04.10.2019. 15:00 све Основи рачунарске технике 2228 01.10.2019. 15:00 све Социологија
I година Математика 1 2225 03.10.2019. 15:00 све Основи електротехнике 1 2226 30.09.2019. 15:00 све Програмирање 1 2227 04.10.2019. 15:00 све Основи рачунарске технике 2228 01.10.2019. 15:00 све Социологија
(Microsoft Word - MATB - kolovoz osnovna razina - rje\232enja zadataka)
") . B. Zapišimo zadane brojeve u obliku beskonačno periodičnih decimalnih brojeva: 3 4 = 0.7, = 0.36. Prvi od navedenih četiriju brojeva je manji od 3 4, dok su treći i četvrti veći od. Jedini broj koji
. B. Zapišimo zadane brojeve u obliku beskonačno periodičnih decimalnih brojeva: 3 4 = 0.7, = 0.36. Prvi od navedenih četiriju brojeva je manji od 3 4, dok su treći i četvrti veći od. Jedini broj koji
Microsoft Word - V03-Prelijevanje.doc
 Praktikum iz hidraulike Str. 3-1 III vježba Prelijevanje preko širokog praga i preljeva praktičnog profila Mali stakleni žlijeb je izrađen za potrebe mjerenja pojedinih hidrauličkih parametara tečenja
Praktikum iz hidraulike Str. 3-1 III vježba Prelijevanje preko širokog praga i preljeva praktičnog profila Mali stakleni žlijeb je izrađen za potrebe mjerenja pojedinih hidrauličkih parametara tečenja
Slide 1
 ULAZNI UREĐAJI IZVORI PODATAKA: Čovek, Proces (preko senzora i davača), Spoljne memorije, Drugi računarski sistemi. 18.1.2019. 2 VRSTA PODATAKA KARAKTERI (tekst, brojevi, znakovi) SLIKA, ZVUK, RADIO ILI
ULAZNI UREĐAJI IZVORI PODATAKA: Čovek, Proces (preko senzora i davača), Spoljne memorije, Drugi računarski sistemi. 18.1.2019. 2 VRSTA PODATAKA KARAKTERI (tekst, brojevi, znakovi) SLIKA, ZVUK, RADIO ILI
4
 4.1.2 Eksperimentalni rezultati Rezultati eksperimentalnog istraživanja obrađeni su u programu za digitalno uređivanje audio zapisa (Coll Edit). To je program koji omogućava široku obradu audio zapisa.
4.1.2 Eksperimentalni rezultati Rezultati eksperimentalnog istraživanja obrađeni su u programu za digitalno uređivanje audio zapisa (Coll Edit). To je program koji omogućava široku obradu audio zapisa.
Logičke izjave i logičke funkcije
 Logičke izjave i logičke funkcije Građa računala, prijenos podataka u računalu Što su logičke izjave? Logička izjava je tvrdnja koja može biti istinita (True) ili lažna (False). Ako je u logičkoj izjavi
Logičke izjave i logičke funkcije Građa računala, prijenos podataka u računalu Što su logičke izjave? Logička izjava je tvrdnja koja može biti istinita (True) ili lažna (False). Ako je u logičkoj izjavi
WAMSTER Prezentacija
 WAMSTER Mi smo Studio Elektronike Rijeka d.o.o. tvrtka za razvoj tehnoloških rješenja u automatici i elektronici tvrka osnovana 2006. na temelju komercijalizacije rezultata magistarskog rada locirani u
WAMSTER Mi smo Studio Elektronike Rijeka d.o.o. tvrtka za razvoj tehnoloških rješenja u automatici i elektronici tvrka osnovana 2006. na temelju komercijalizacije rezultata magistarskog rada locirani u
Svaki stupanj je bitan!
 Fotografija smještaja svaki stupanj je bitan! Važnost kvalitete fotografija u smještajnim kapacitetima i 360 fotografija Diego Martinčić istrapano360.com Tehnika fotografije Fotografirano mobitelom Fotografirano
Fotografija smještaja svaki stupanj je bitan! Važnost kvalitete fotografija u smještajnim kapacitetima i 360 fotografija Diego Martinčić istrapano360.com Tehnika fotografije Fotografirano mobitelom Fotografirano
Algoritmi SŠ P1
 Državno natjecanje iz informatike Srednja škola Prvi dan natjecanja 2. ožujka 219. ime zadatka BADMINTON SJEME MANIPULATOR vremensko ograničenje 1 sekunda 1 sekunda 3 sekunde memorijsko ograničenje 512
Državno natjecanje iz informatike Srednja škola Prvi dan natjecanja 2. ožujka 219. ime zadatka BADMINTON SJEME MANIPULATOR vremensko ograničenje 1 sekunda 1 sekunda 3 sekunde memorijsko ograničenje 512
Орт колоквијум
 II колоквијум из Основа рачунарске технике I - 27/28 (.6.28.) Р е ш е њ е Задатак На улазе x, x 2, x 3, x 4 комбинационе мреже, са излазом z, долази четворобитни BCD број. Ако број са улаза при дељењу
II колоквијум из Основа рачунарске технике I - 27/28 (.6.28.) Р е ш е њ е Задатак На улазе x, x 2, x 3, x 4 комбинационе мреже, са излазом z, долази четворобитни BCD број. Ако број са улаза при дељењу
8. razred kriteriji pravi
 KRITERIJI OCJENJIVANJA MATEMATIKA 8. RAZRED Učenik će iz nastavnog predmeta matematike biti ocjenjivan usmeno i pismeno. Pismeno ocjenjivanje: U osmom razredu piše se šest ispita znanja i bodovni prag
KRITERIJI OCJENJIVANJA MATEMATIKA 8. RAZRED Učenik će iz nastavnog predmeta matematike biti ocjenjivan usmeno i pismeno. Pismeno ocjenjivanje: U osmom razredu piše se šest ispita znanja i bodovni prag
Slide 1
 Osnovni koraci uspješne GIS analize 1. Odredi razmjer, geografsko područje interesa 2. Definiraj rezoluciju ( veličinu zrna ) najmanji element koji želim identificirati 3. Odaberi najprimjereniji model
Osnovni koraci uspješne GIS analize 1. Odredi razmjer, geografsko područje interesa 2. Definiraj rezoluciju ( veličinu zrna ) najmanji element koji želim identificirati 3. Odaberi najprimjereniji model
OpenVPN GUI CERT.hr-PUBDOC
 OpenVPN GUI CERT.hr-PUBDOC-2019-7-384 Sadržaj 1 UVOD... 3 2 INSTALACIJA ALATA OPENVPN GUI... 5 3 KORIŠTENJE ALATA OPENVPN GUI... 17 4 ZAKLJUČAK... 27 Ovaj dokument izradio je Laboratorij za sustave i signale
OpenVPN GUI CERT.hr-PUBDOC-2019-7-384 Sadržaj 1 UVOD... 3 2 INSTALACIJA ALATA OPENVPN GUI... 5 3 KORIŠTENJE ALATA OPENVPN GUI... 17 4 ZAKLJUČAK... 27 Ovaj dokument izradio je Laboratorij za sustave i signale
Golden 7 Classic HTML5 na stolnim računalima i mobilnim uređajima. Vrsta igre: Video slot PVI (povratak vrijednosti igraču): 95,00 % Golden 7 Classic
: 95,00 % Golden 7 Classic") Golden 7 Classic HTML5 na stolnim računalima i mobilnim uređajima. Vrsta igre: Video slot PVI (povratak vrijednosti igraču): 95,00 % Golden 7 Classic tradicionalna je slot igra stare škole u kojoj nema
Golden 7 Classic HTML5 na stolnim računalima i mobilnim uređajima. Vrsta igre: Video slot PVI (povratak vrijednosti igraču): 95,00 % Golden 7 Classic tradicionalna je slot igra stare škole u kojoj nema
GLAZBENA UČILICA Marko Beus Filozofski fakultet u Zagrebu 098/ Sažetak Glazbena učilica je projekt osmišljen kao nadopuna
 GLAZBENA UČILICA Marko Beus Filozofski fakultet u Zagrebu beusmarko@gmail.com 098/938-8295 Sažetak Glazbena učilica je projekt osmišljen kao nadopuna nastavnom programu solfeggia u osnovnim glazbenim školama.
GLAZBENA UČILICA Marko Beus Filozofski fakultet u Zagrebu beusmarko@gmail.com 098/938-8295 Sažetak Glazbena učilica je projekt osmišljen kao nadopuna nastavnom programu solfeggia u osnovnim glazbenim školama.
Школа Ј. Ј. Змај Свилајнац МЕСЕЧНИ ПЛАН РАДА ЗА СЕПТЕМБАР Школска 2018 /2019. Назив предмета: Информатика и рачунарство Разред: 5. Недељни број часова
 Школа Ј. Ј. Змај Свилајнац МЕСЕЧНИ ПЛАН РАДА ЗА СЕПТЕМБАР јединице 1. 1. Увод у информатику и рачунарство 1. 2. Oрганизација података на рачунару 1. 3. Рад са текстуалним документима 1. 4. Форматирање
Школа Ј. Ј. Змај Свилајнац МЕСЕЧНИ ПЛАН РАДА ЗА СЕПТЕМБАР јединице 1. 1. Увод у информатику и рачунарство 1. 2. Oрганизација података на рачунару 1. 3. Рад са текстуалним документима 1. 4. Форматирање
I година Назив предмета I термин Вријеме II термин Вријеме Сала Математика : :00 све Основи електротехнике
 I година Математика 1 2225 20.06.2019. 9:00 04.07.2019. 9:00 све Основи електротехнике 1 2226 17.06.2019. 9:00 01.07.2019. 13:00 све Програмирање 1 2227 21.06.2019. 9:00 05.07.2019. 9:00 све Основи рачунарске
I година Математика 1 2225 20.06.2019. 9:00 04.07.2019. 9:00 све Основи електротехнике 1 2226 17.06.2019. 9:00 01.07.2019. 13:00 све Програмирање 1 2227 21.06.2019. 9:00 05.07.2019. 9:00 све Основи рачунарске
I година Назив предмета I термин Вријеме II термин Вријеме Сала Математика : :00 све Основи електротехнике
 I година Математика 1 2225 05.09.2019. 9:00 19.09.2019. 9:00 све Основи електротехнике 1 2226 02.09.2019. 9:00 16.09.2019. 9:00 све Програмирање 1 2227 06.09.2019. 9:00 20.09.2019. 9:00 све Основи рачунарске
I година Математика 1 2225 05.09.2019. 9:00 19.09.2019. 9:00 све Основи електротехнике 1 2226 02.09.2019. 9:00 16.09.2019. 9:00 све Програмирање 1 2227 06.09.2019. 9:00 20.09.2019. 9:00 све Основи рачунарске